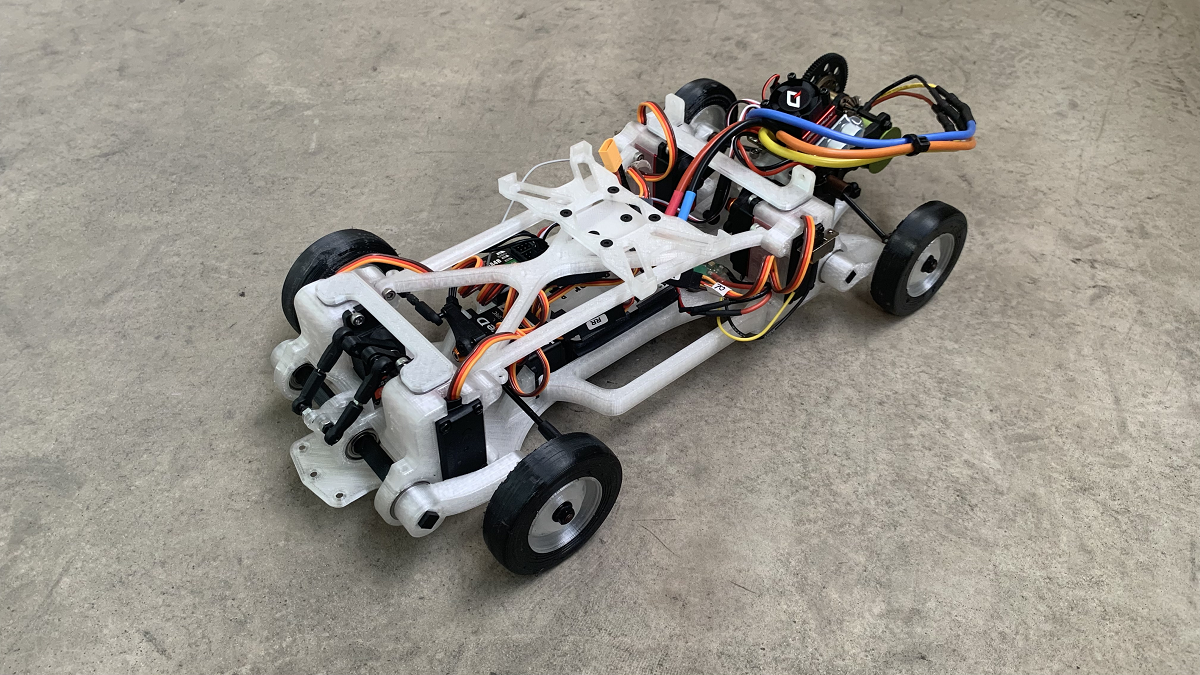
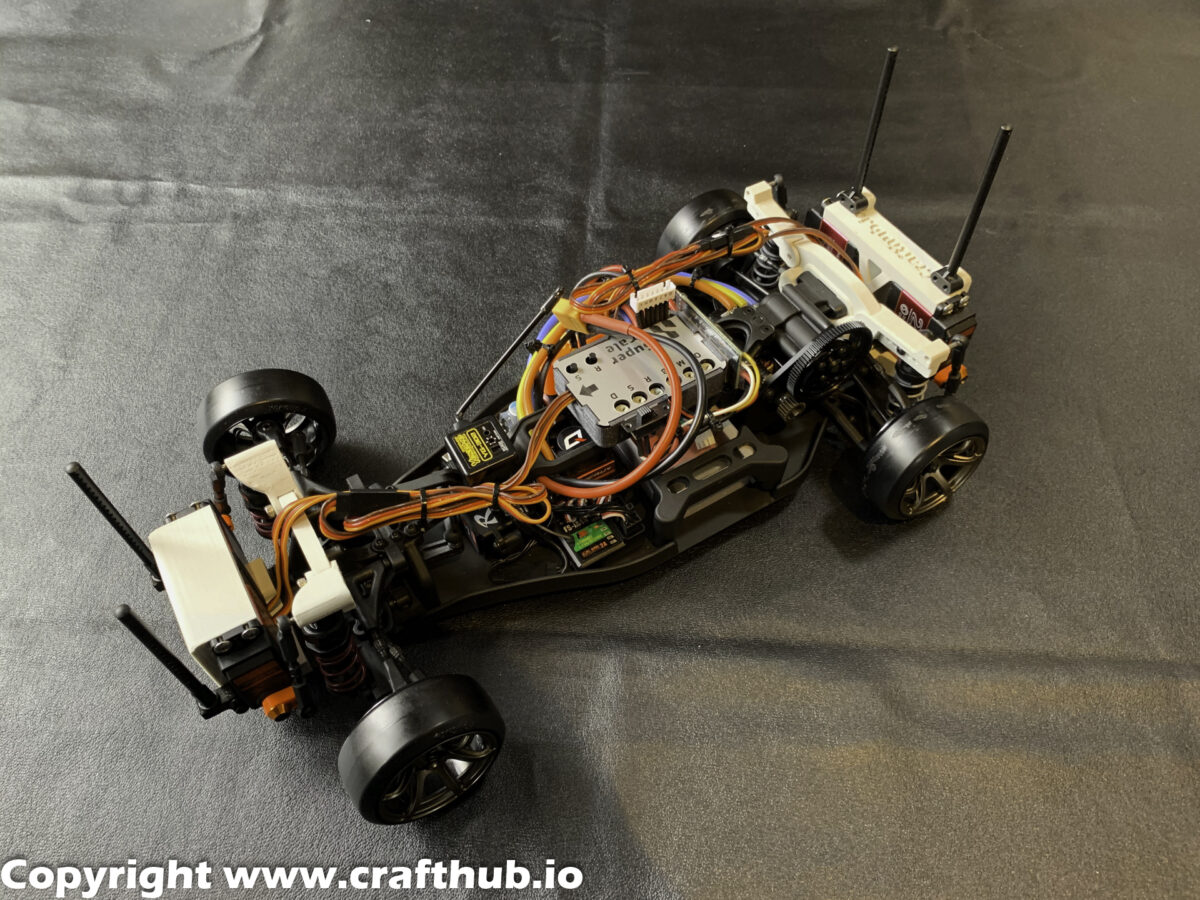
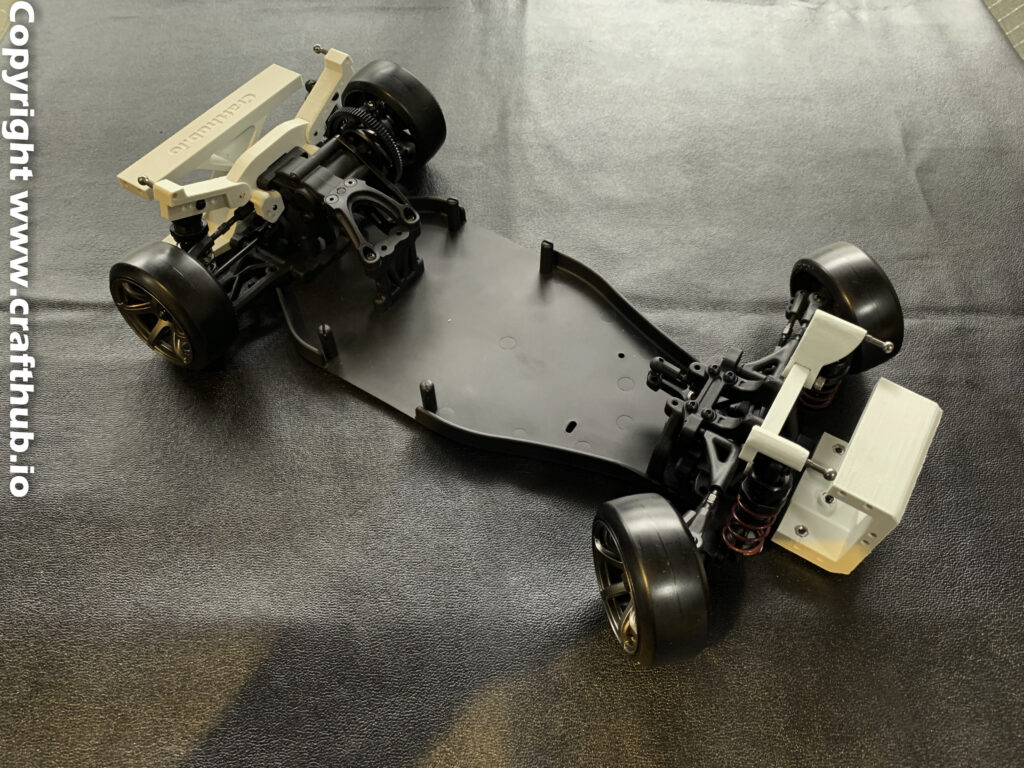
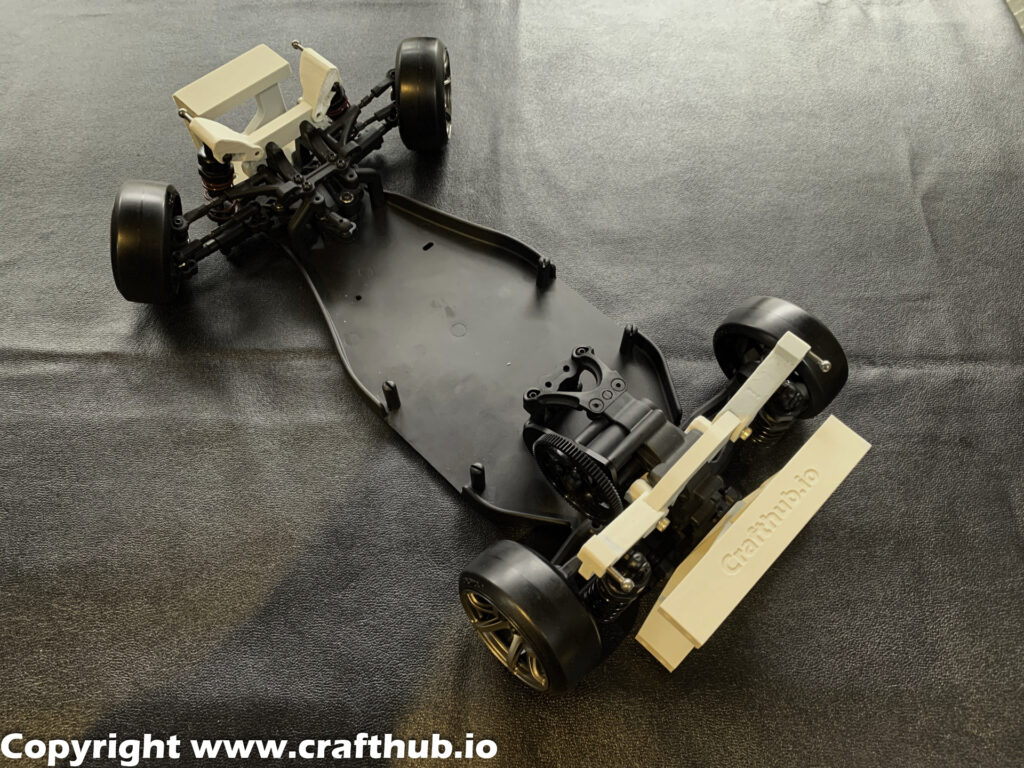
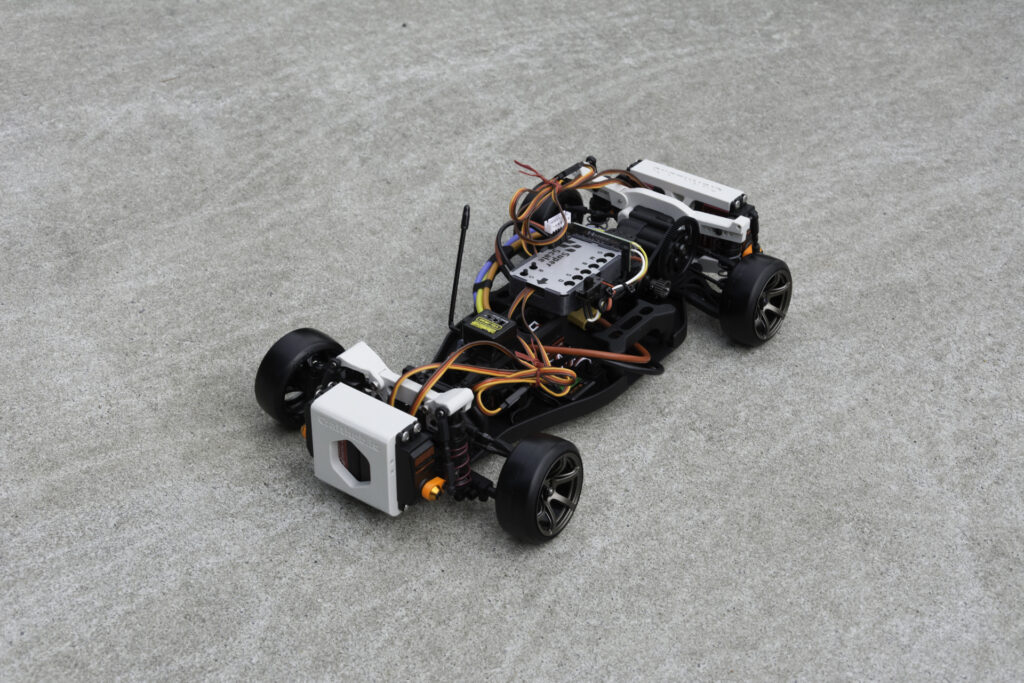
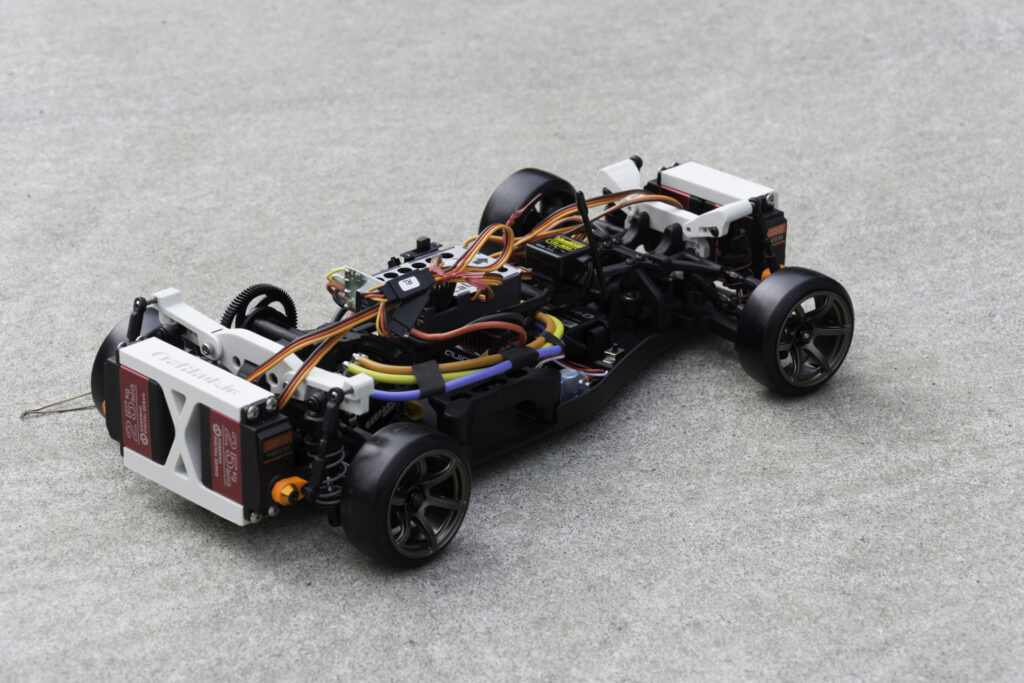
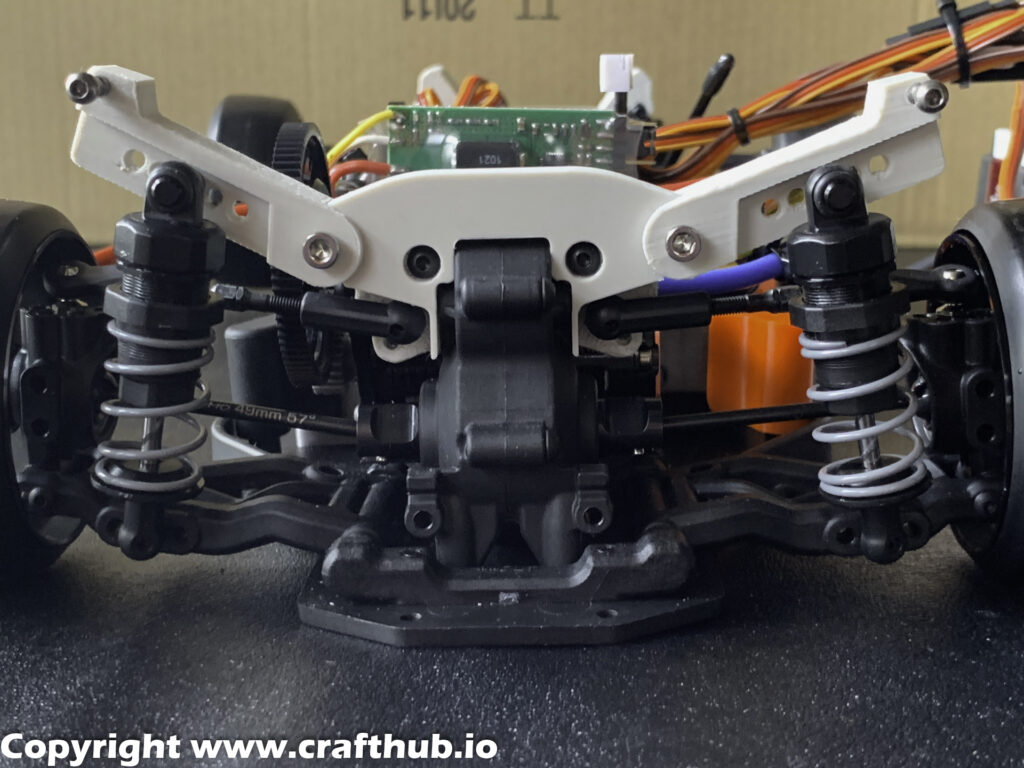
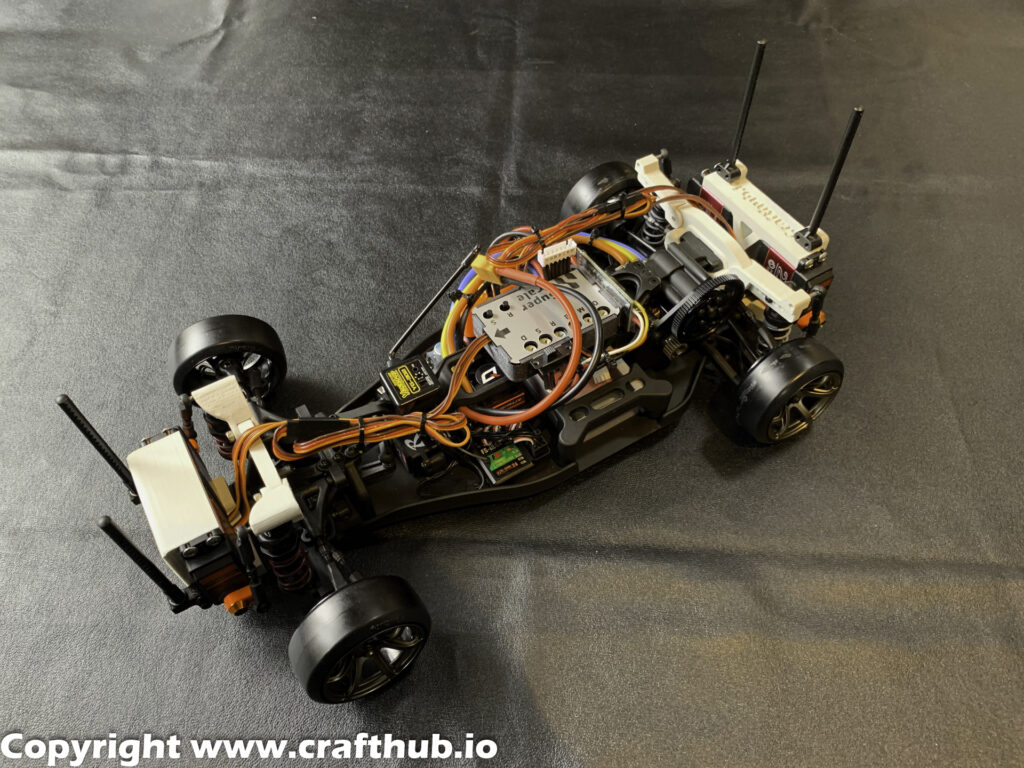
This kit is a chassis to use the Superscale2020 active suspension unit effectively. It features a compact package that combines torsion bars and active suspension in the size of the Tamiya M chassis (wheelbase 239mm).
This model also uses gripped tires for a more realistic scale appearance. We recommend using a DC motor for the crawler or a multi-pole brushless DC motor to enjoy realistic behavior at very low speeds.
Drivetrain
The drivetrain of this kit is designed to maximize the use of Sakura D5 parts available to everyone. As a result, it is possible to use active suspension at a lower cost than collecting the necessary parts individually.
A steering gyro is not necessarily required, as the tires provide some grip.
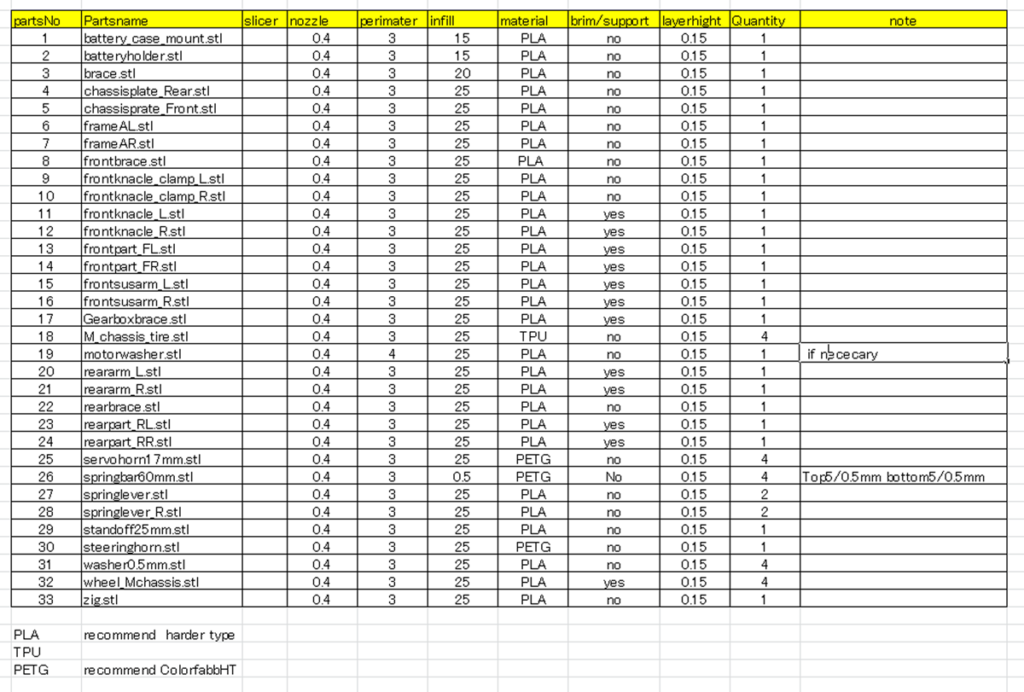
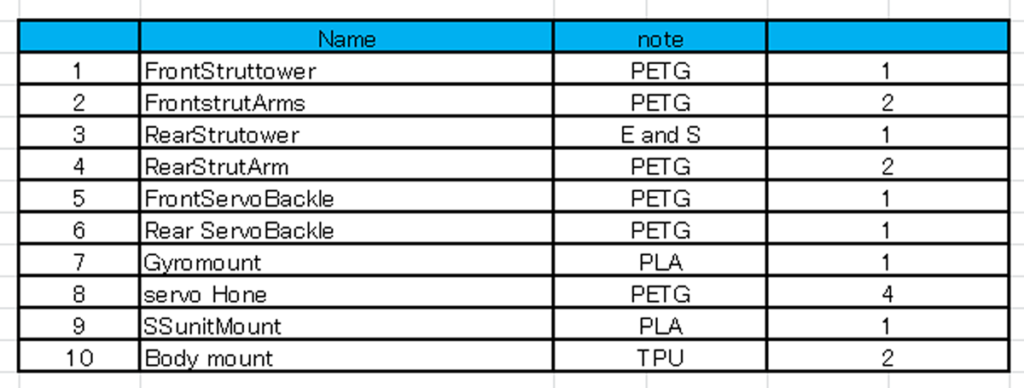
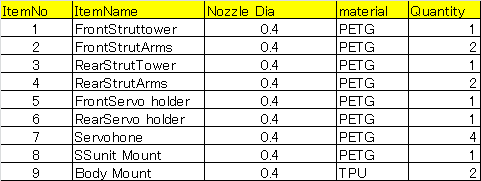
What’s included in the kit
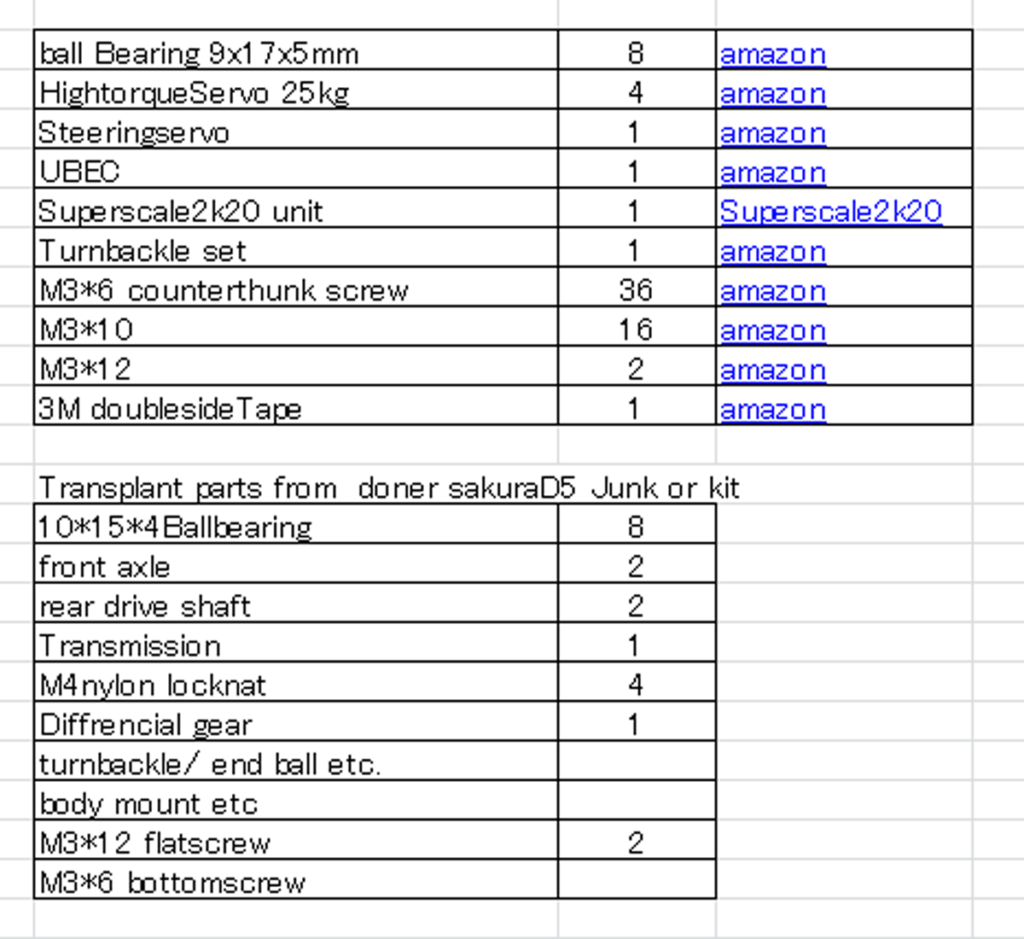
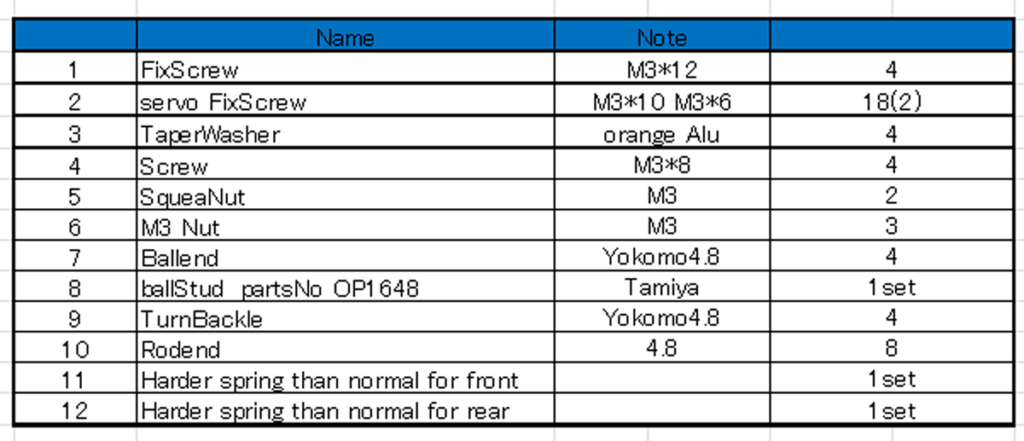
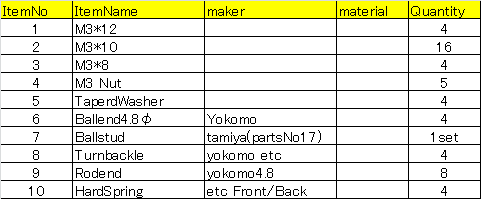
What you need besides the kit
The list with active links can be downloaded from Google drive.
Superscale2020
The Superscale2020 “SS” unit is a key component of this chassis and should be purchased here.
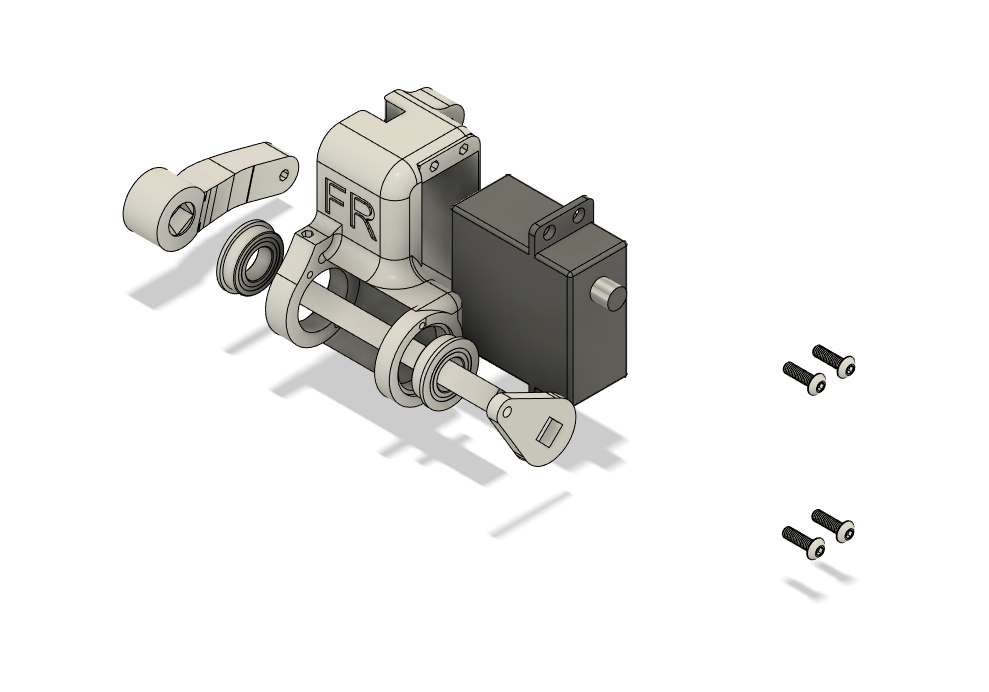
1, Servo and torsion bar box assembly
Front. Install 9*17*5ball bearings and secure servo with M3*10 screws. Do the same for the left side.
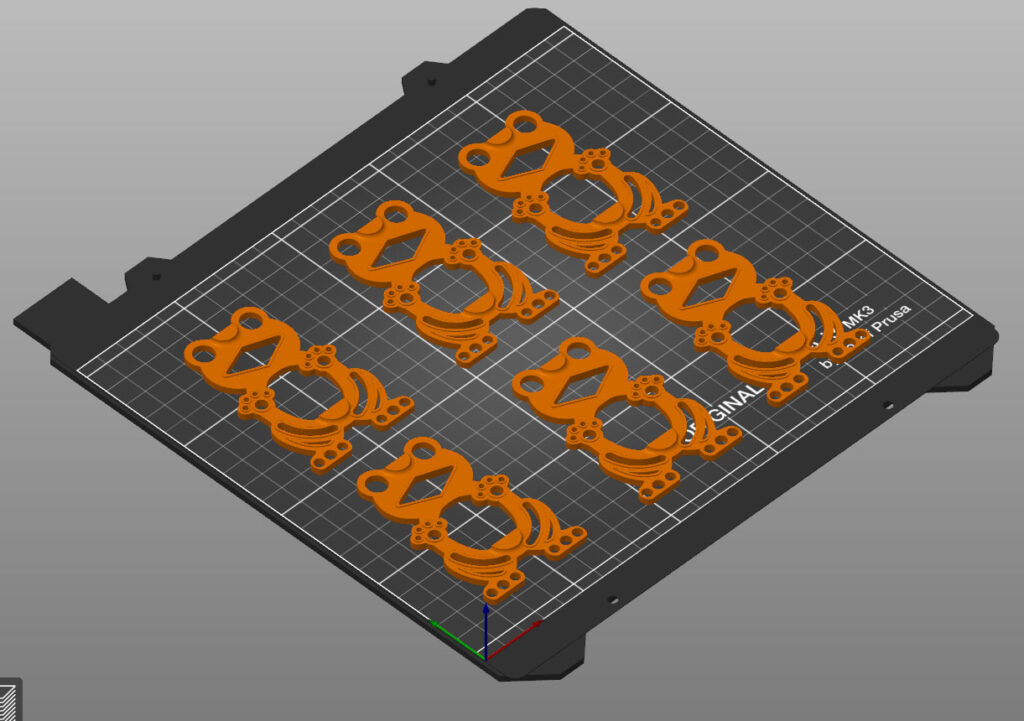
Torsion bars are printed with PETG. Please check the print settings.
Insert the torsion bar into the suspension arm. Use a rubber hammer or similar tool to gently drive it in; use a Zig to drive in the appropriate amount. Do not install the servo horn at this point.
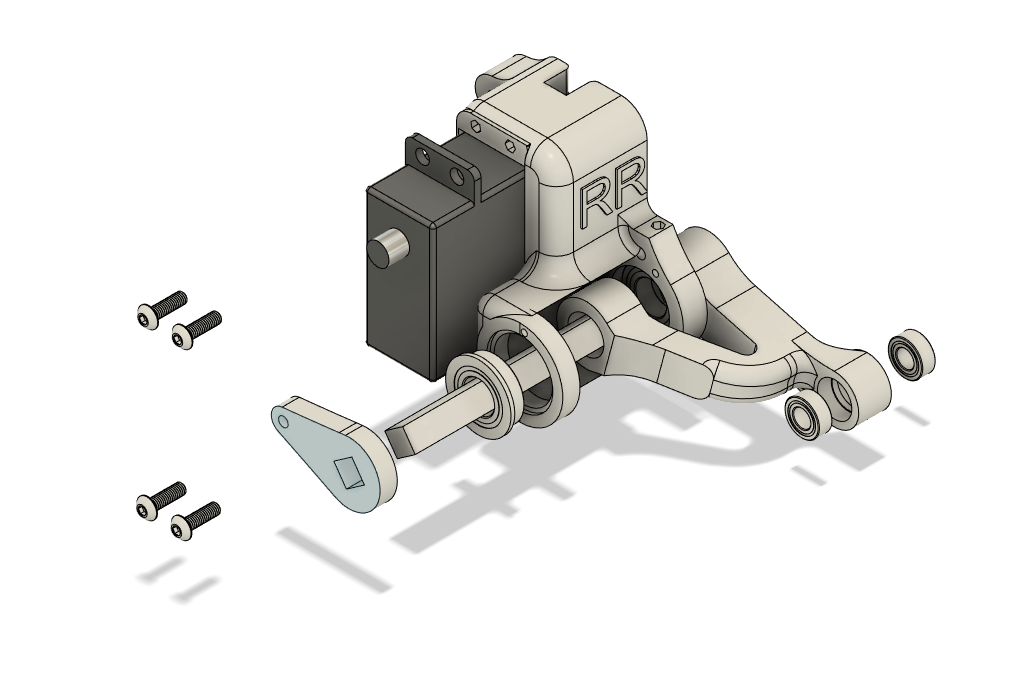
Install 5*10*4 bearings on the sus arm. fix the servo with M3*10 screw. Do the same for the left side.
Install 9*17*5 bearings and spring bars as for the front side. The spring lever is different from the front side, so be sure to check that it is springlever_R.stl and that the installation orientation matches the diagram.
2,Superscale2k20 “ss”unit Unit initialization
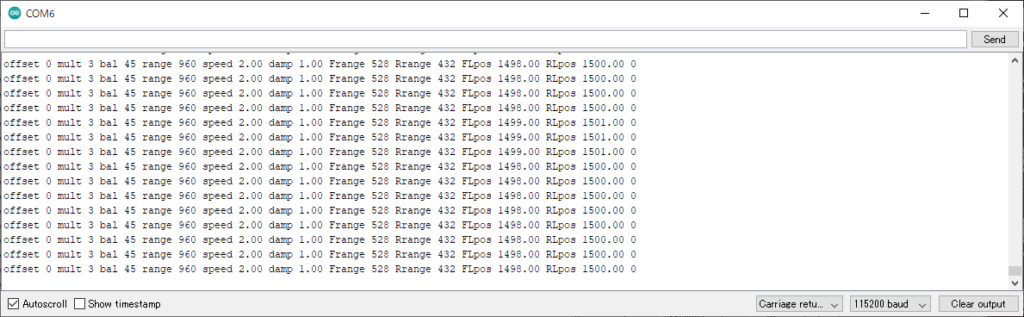
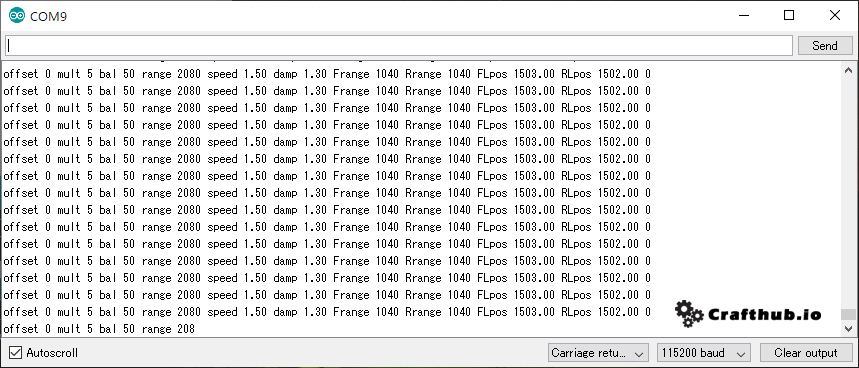
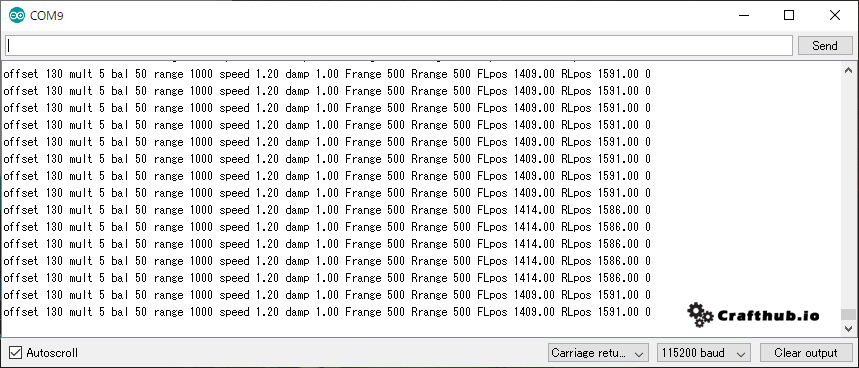
First, use arduinoIDE on your PC to connect to SS unit. Make sure you have the latest version of the firmware. The latest version is Ver1.22 (13 Sep 2022). You can check the version on the serial monitor. Then turn the potentiometer to adjust the offset value to 0, and turn off the power once it is done.
3, Neutral position setting for all servos.
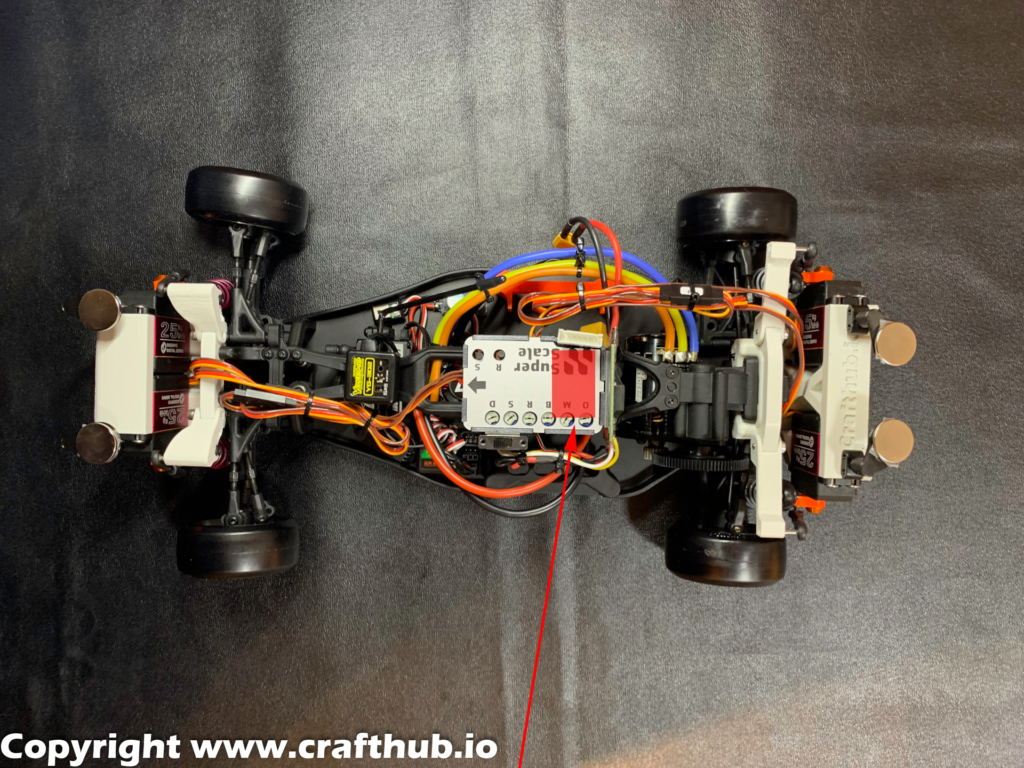
Due to the space limitations of this chassis, it is necessary to connect each servo and SS unit as follows in order to reverse the servo rotation direction.
SSunitRL output>FrontRight servo
SSunitRR output>FrontLeft servo
SSunitFL output >RearRight servo
SSunitFR output >RearLeft servo
After connecting all servos, place the SSunit on a flat surface, turn on the power, and in a few seconds, all servos are in a neutral position and stable. Turn down the power.
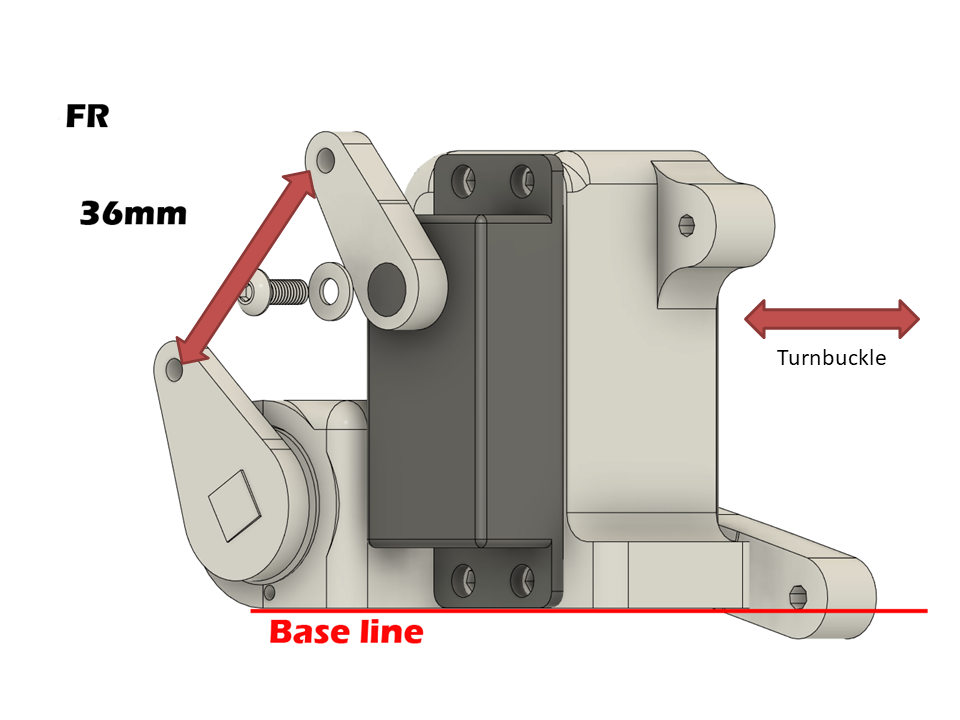
Adjust the neutral position and the axle position with reference to the figure. The servo horn is tightly engaged with the servo output shaft when the screw is tightened.
Set up the left side in the same wayNote the mounting orientation of the ball end!Set up the left side in the same wayNote the mounting orientation of the ball end!
4, Frame Assembly
The steering servo is secured with double side tape.
Then connect the front and rear frames.
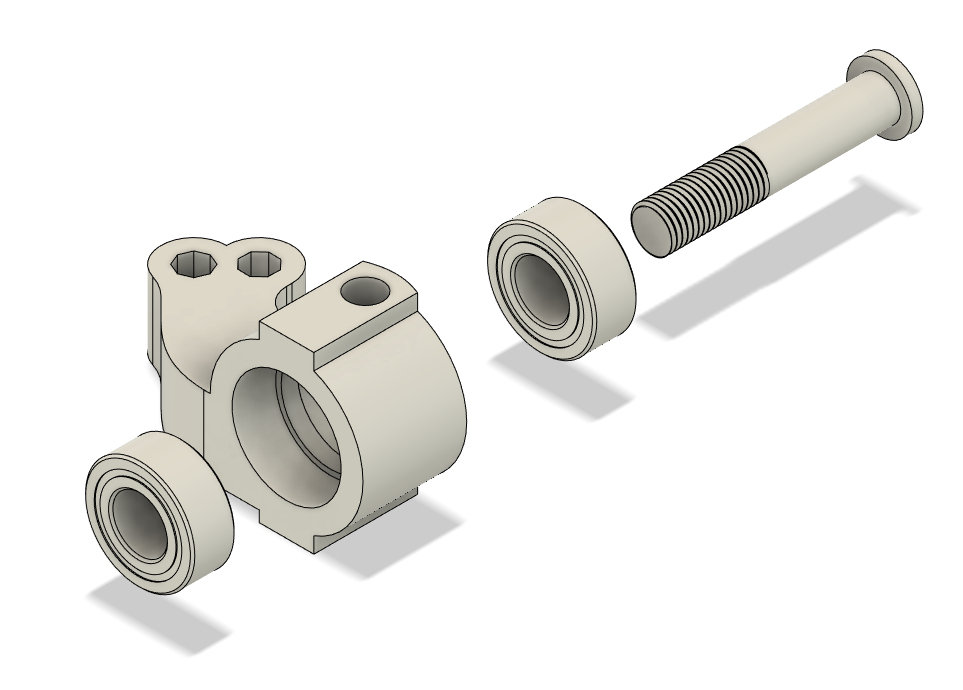
5, Front axle assembly
Fix the knuckle clamps to the suspension arms using Sakura D5 M3*12 flat screws.5*10*4Ballbearing. axle bolt.
6, Brace installation
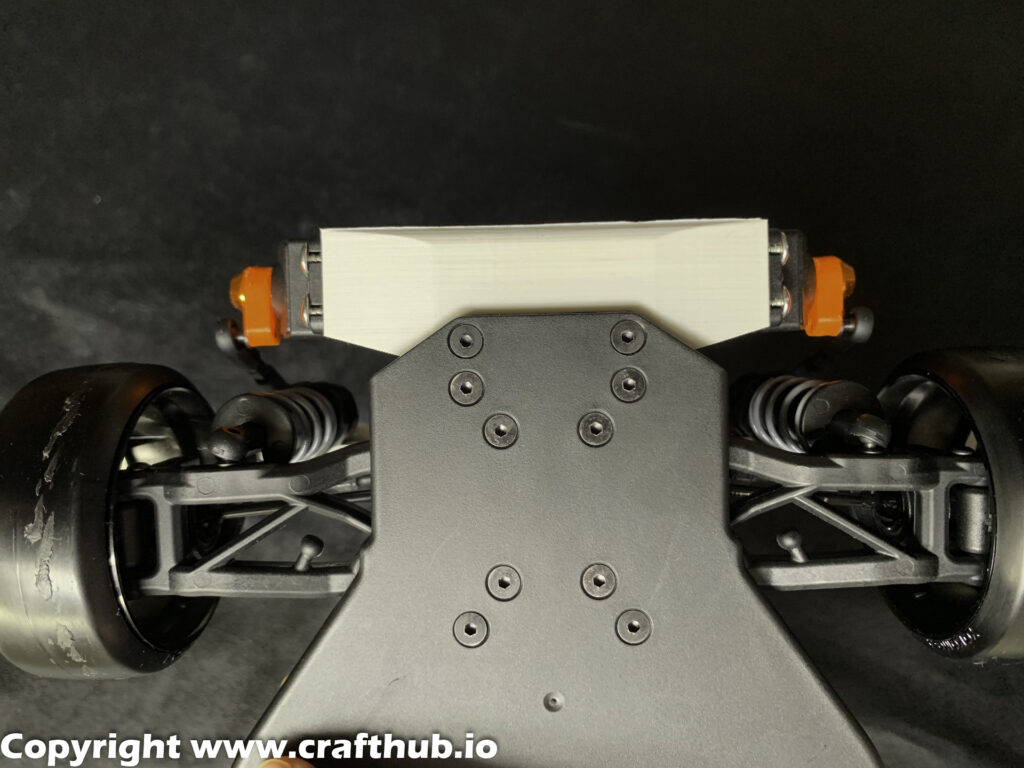
Install the battery holder.The front and rear braces are attached with double side tapes.
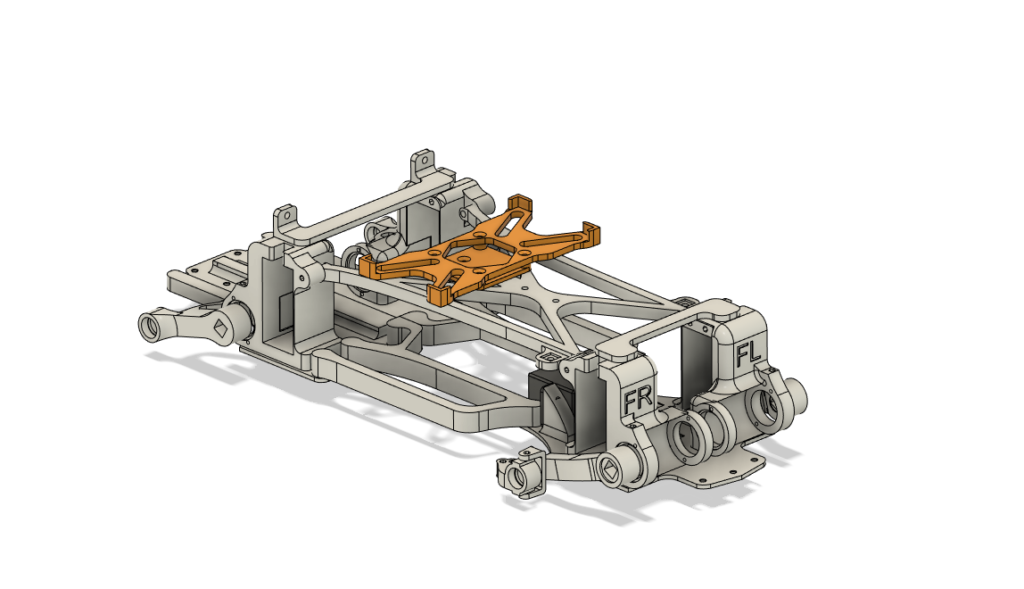
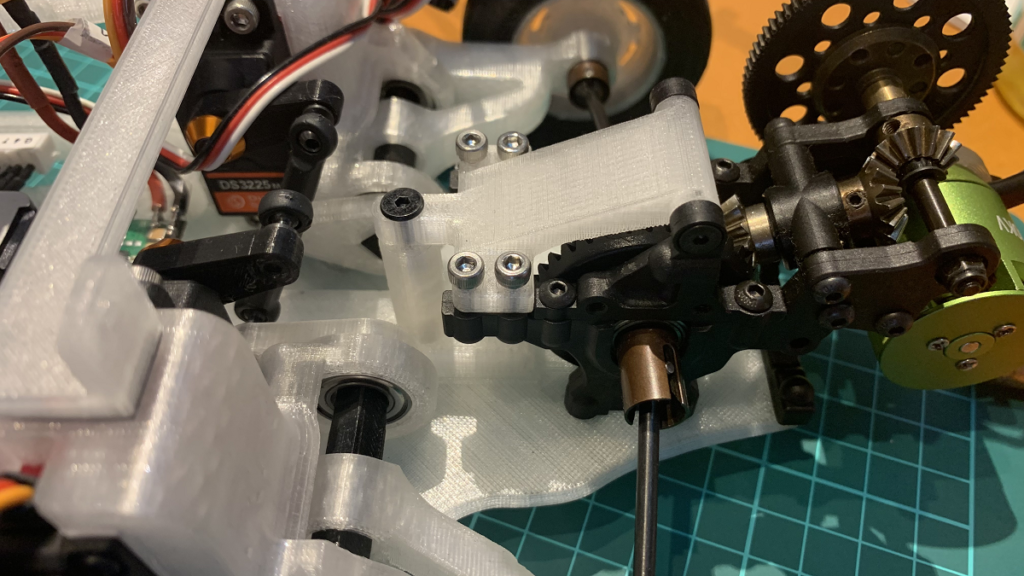
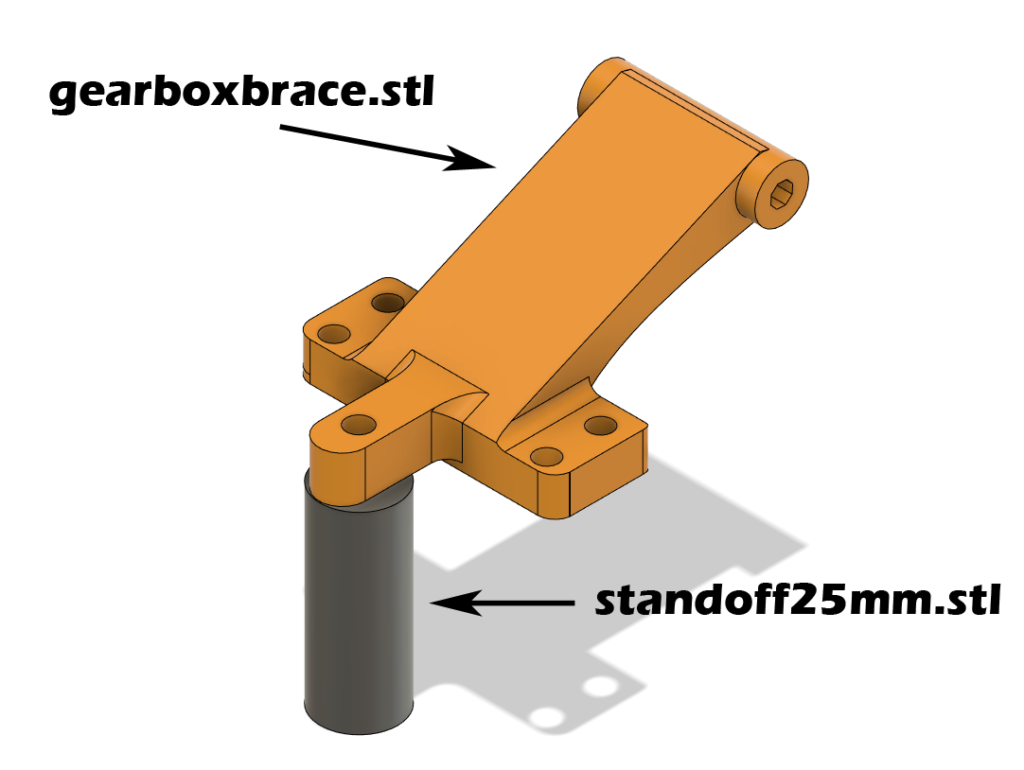
7, Drivetrain
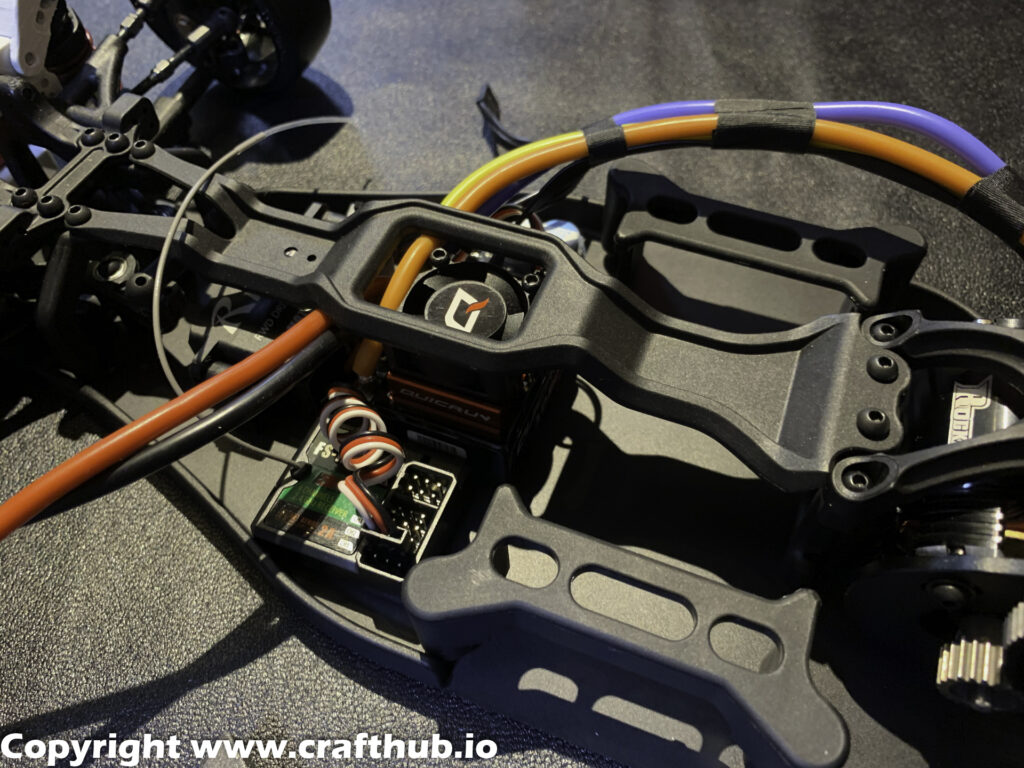
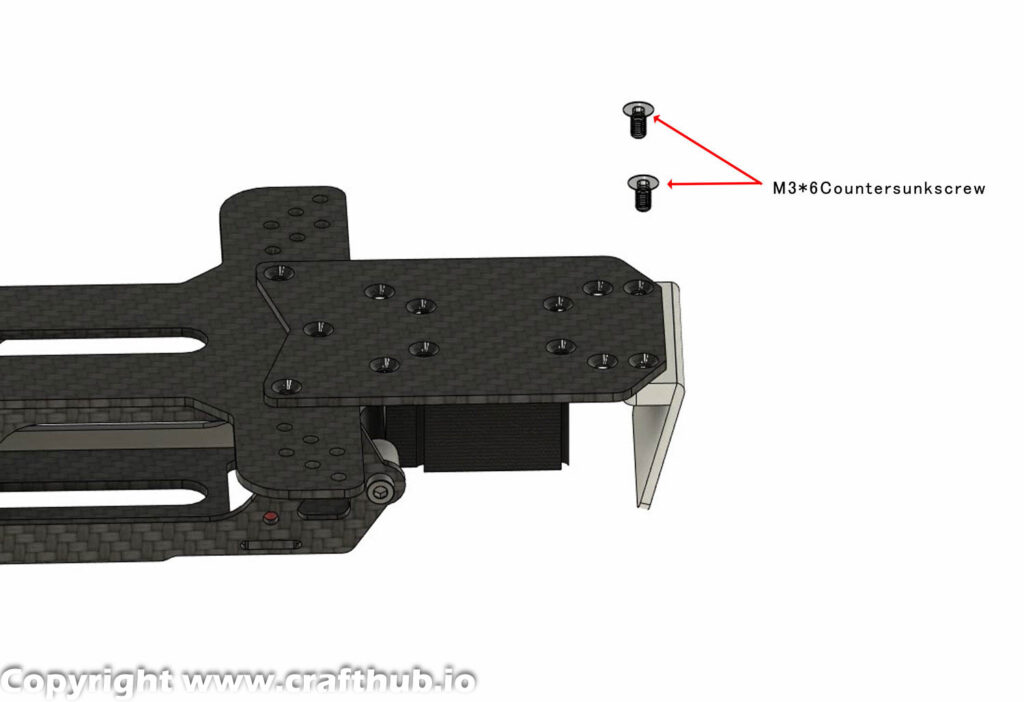
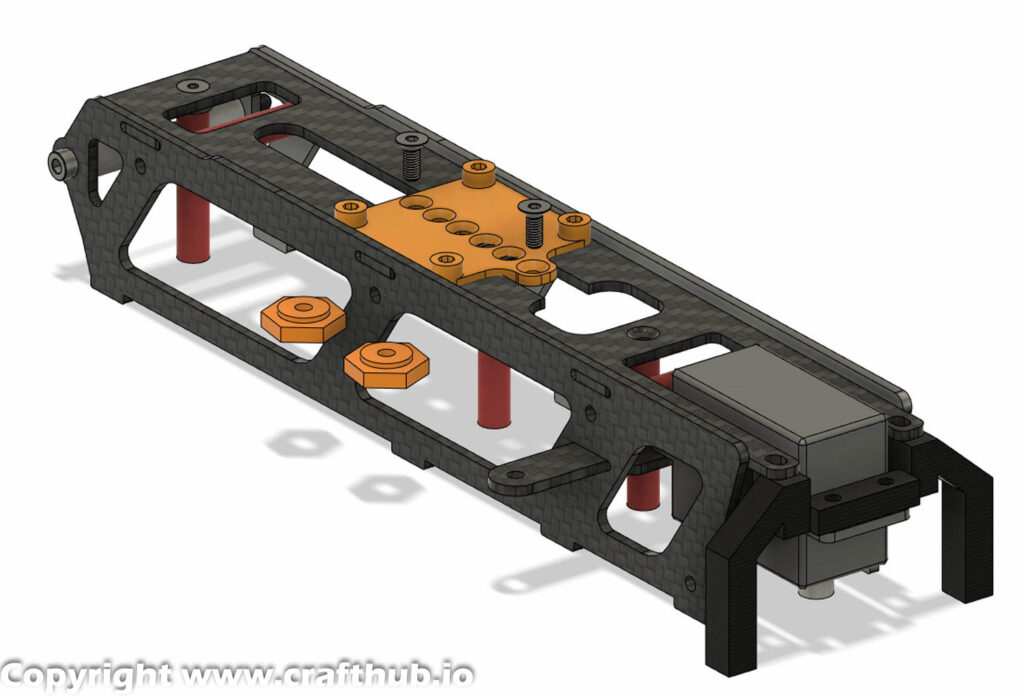
Use standoffs and gearbox braces to ensure frame plate rigidity.
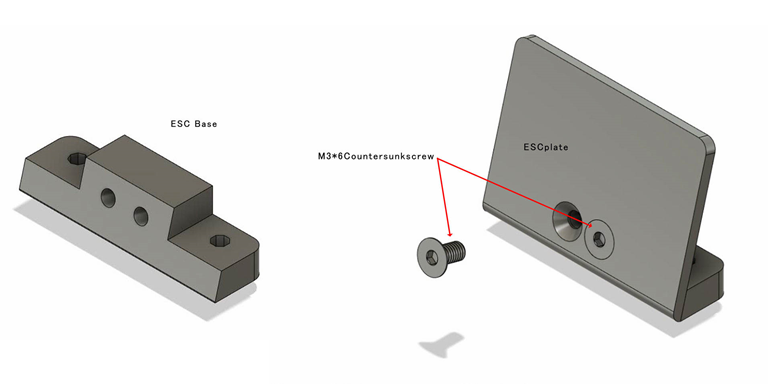
The gearbox brace is also used as an ESC mount.
Fix standoffs from the back of the rear frame as well.
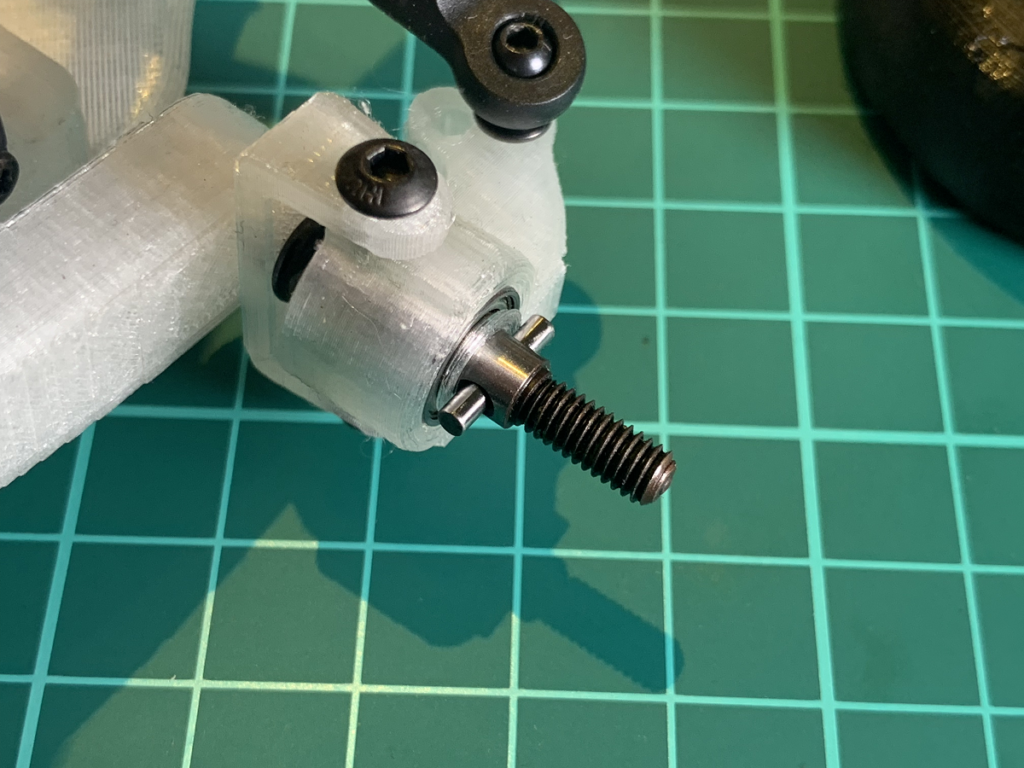
8, Axle with washer
Front axle with 0.5mm washerdone!Rear axle with 0.5mm washerdonewheel back side.
9, SSunit tuning
offset 0
multi 3
Bal 45
Range960
Speed 2.0
Damp1.0
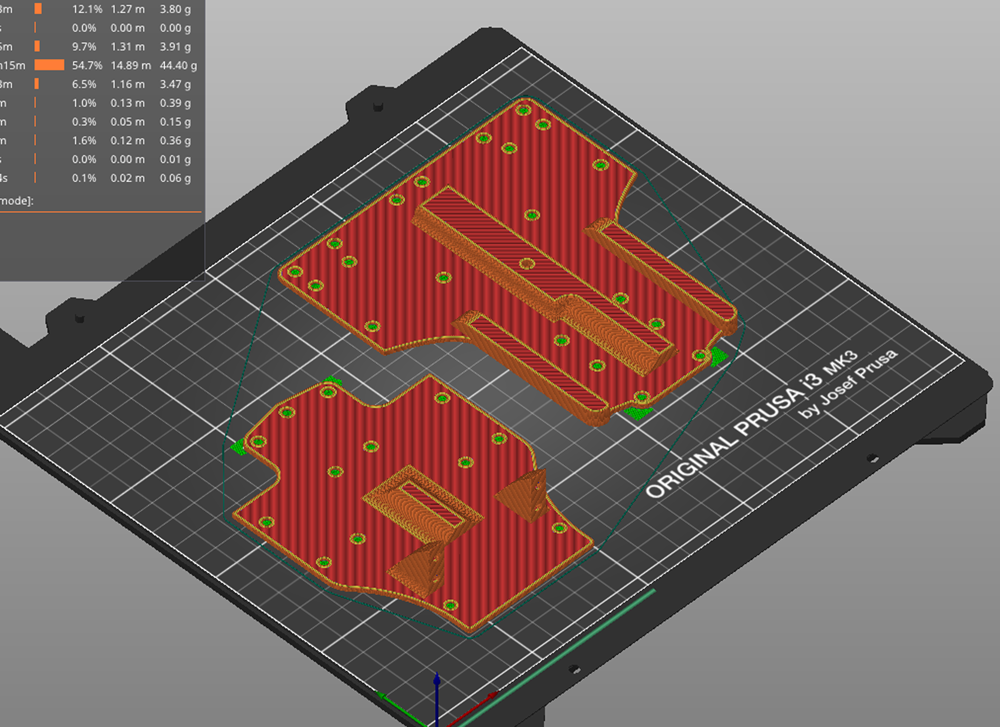
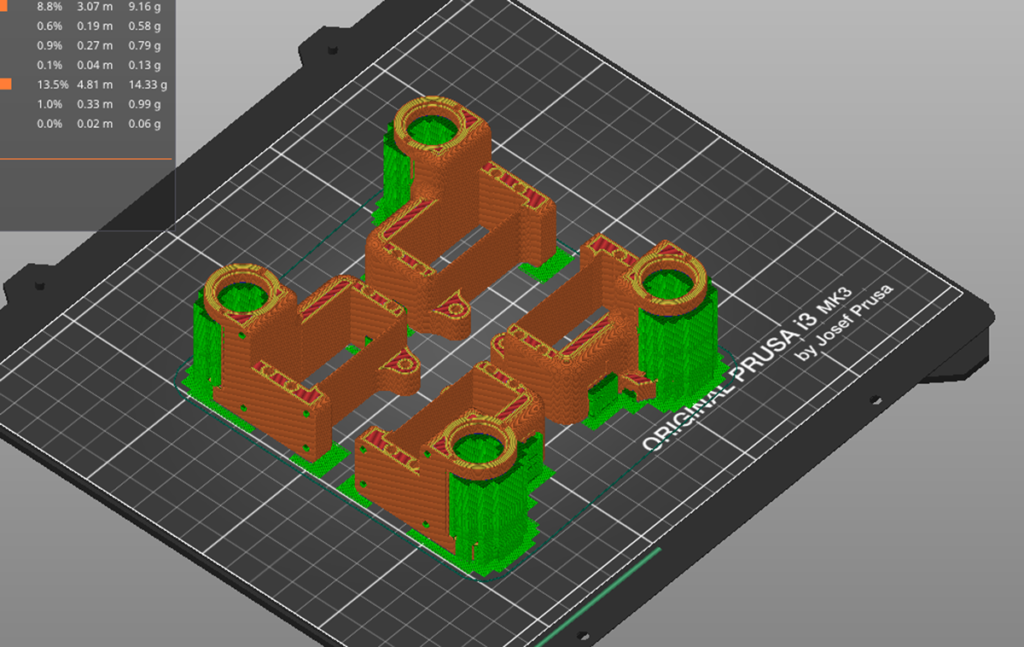
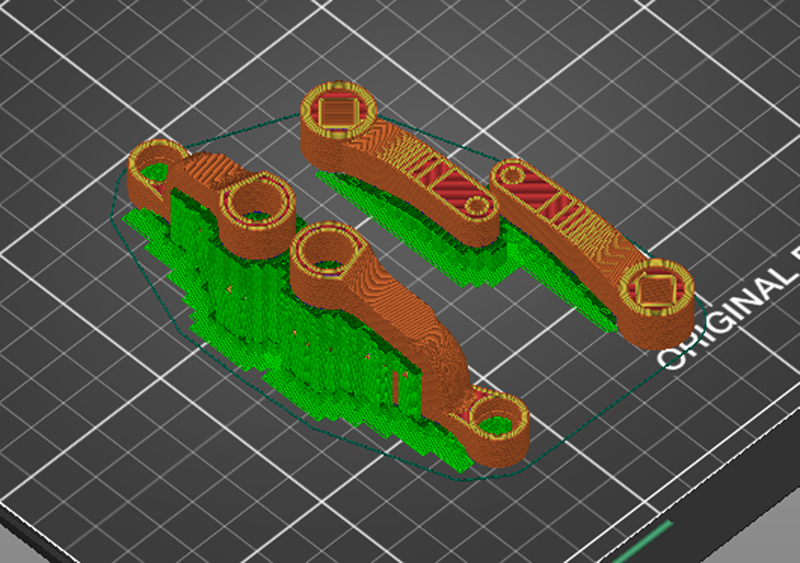
Slice
How to get the STL Data
You can Download this model`s Full STL data from crafthub.io
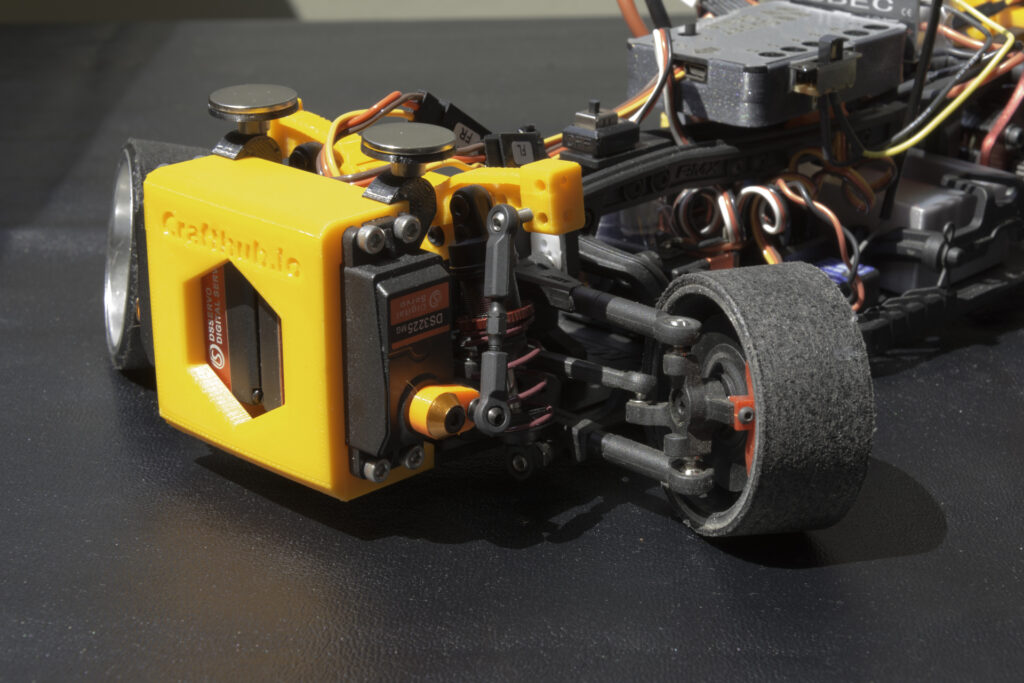
This is a suspension Conversion kit. To use SuperScale2k20 SS Unit, This kit can use the full potential of the SS unit instantly. And you can get the realistic motion for your Yokomo YD-2E/S chassis.
This is an STL Data kit
You have to print out all parts by yourself. The material you should use is ABS or ColorFab HT, etc. otherwise the parts don’t have enough rigidity.PLA is not recommended
Future
Design for Yokomo YD-2 E series /S series
Active suspension and conventional suspension hybrid.
For Drift Car, Don’t need so much torque. 5-10kg may be enough, However, a metal-geared servo is required.
YD2E/YD2S Both types of data are included.
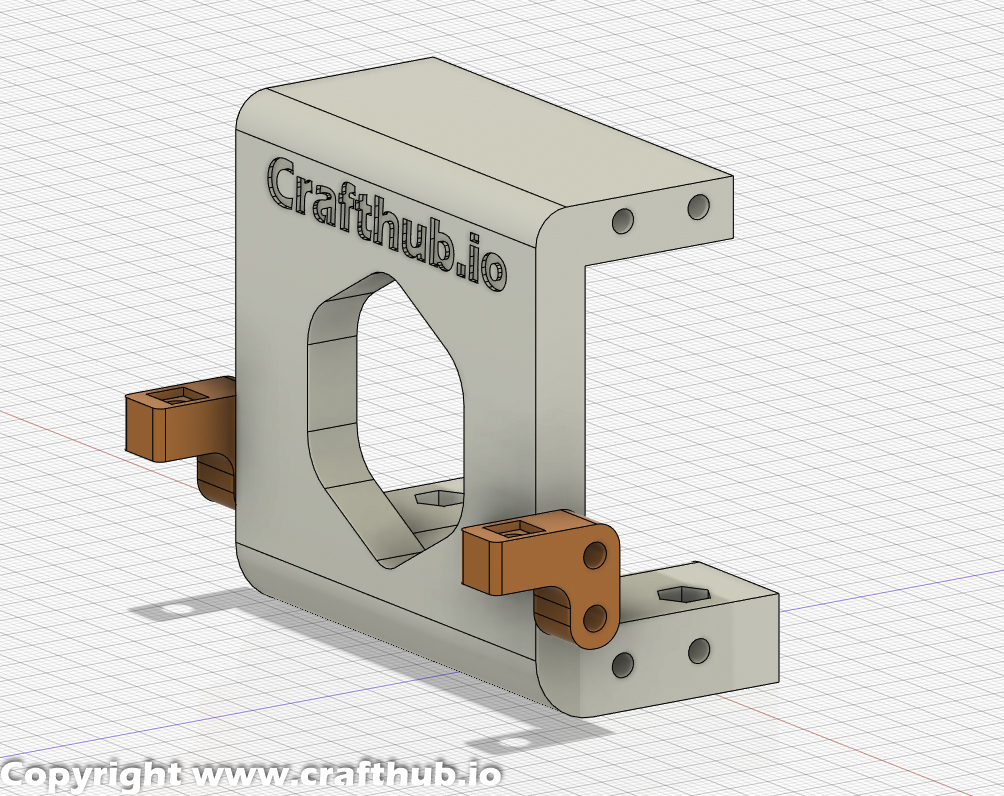
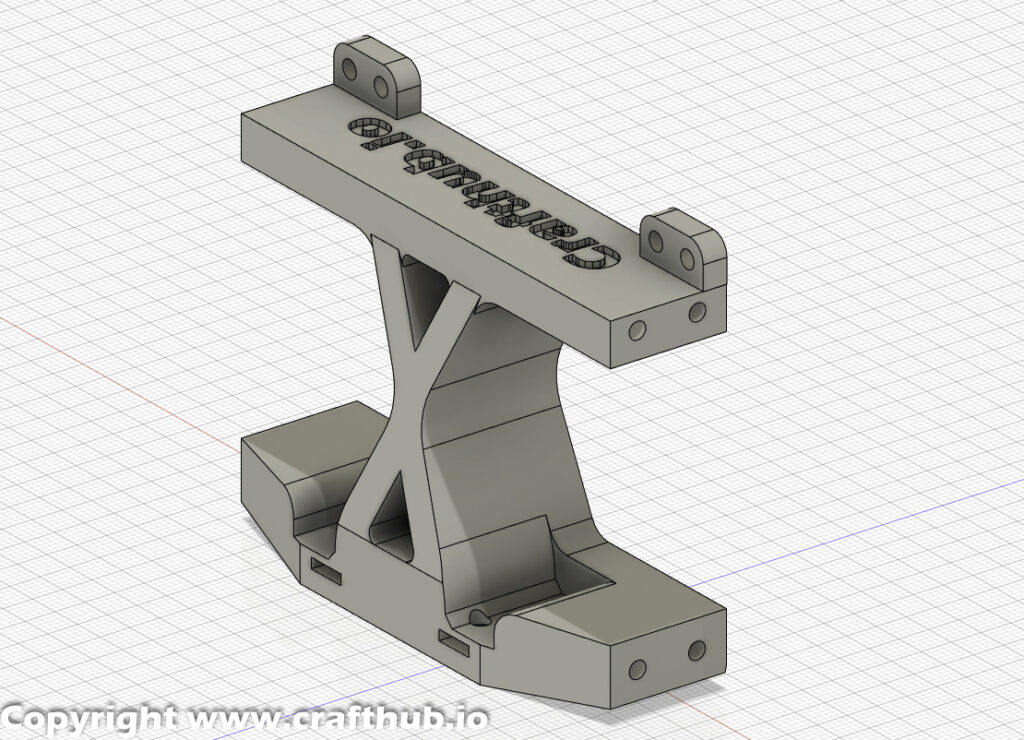
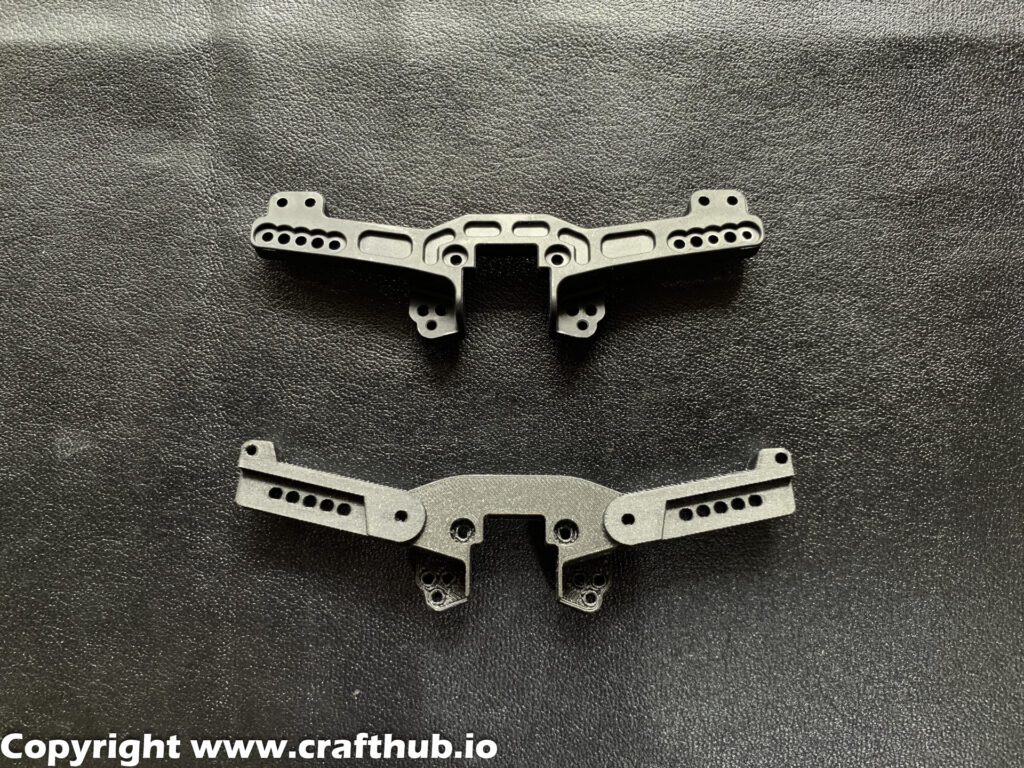
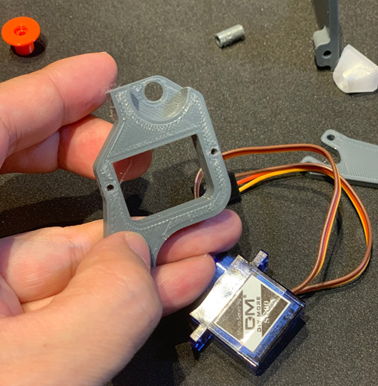
ServoHolder
Front Servo holderRear Servo Holder
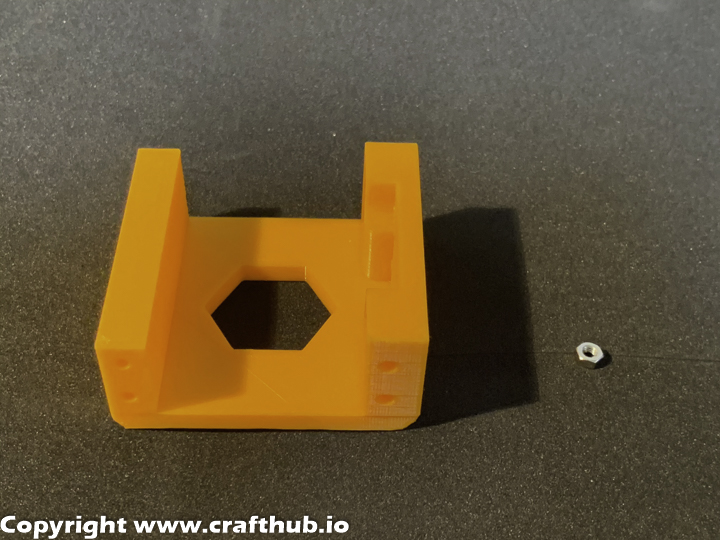
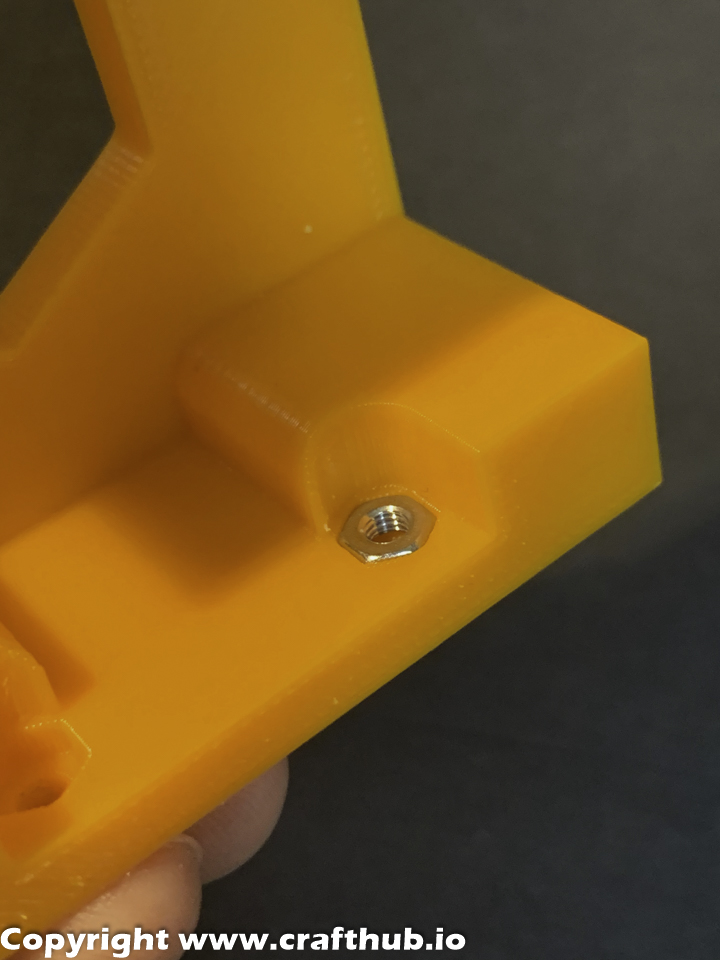
1, Installation
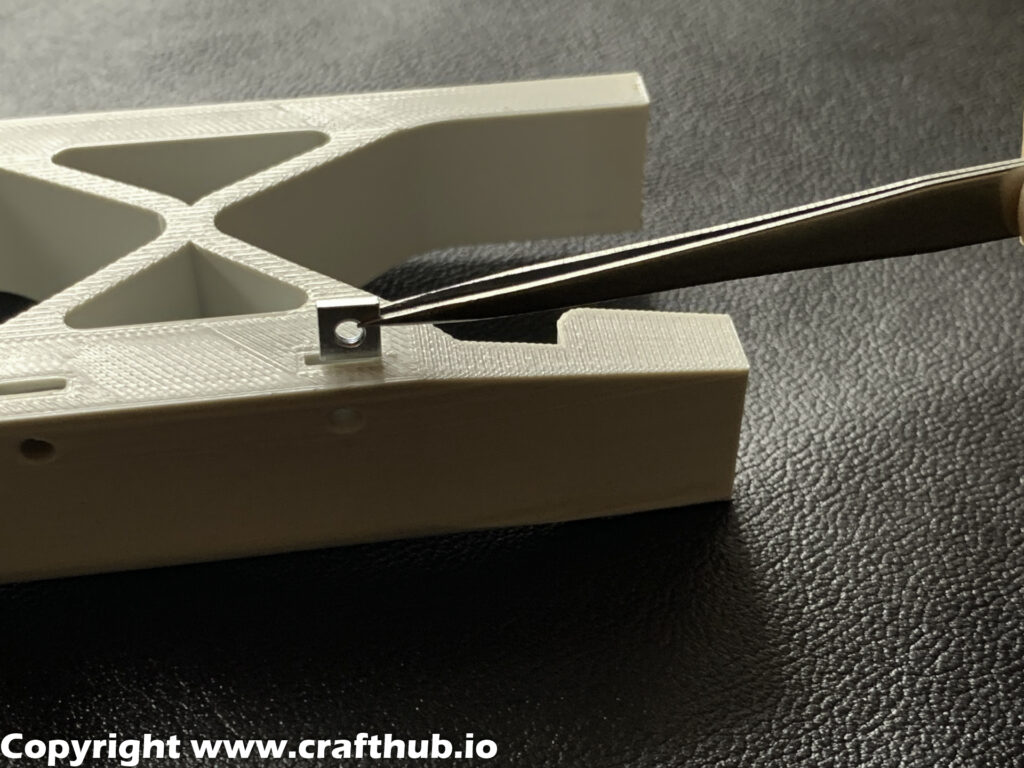
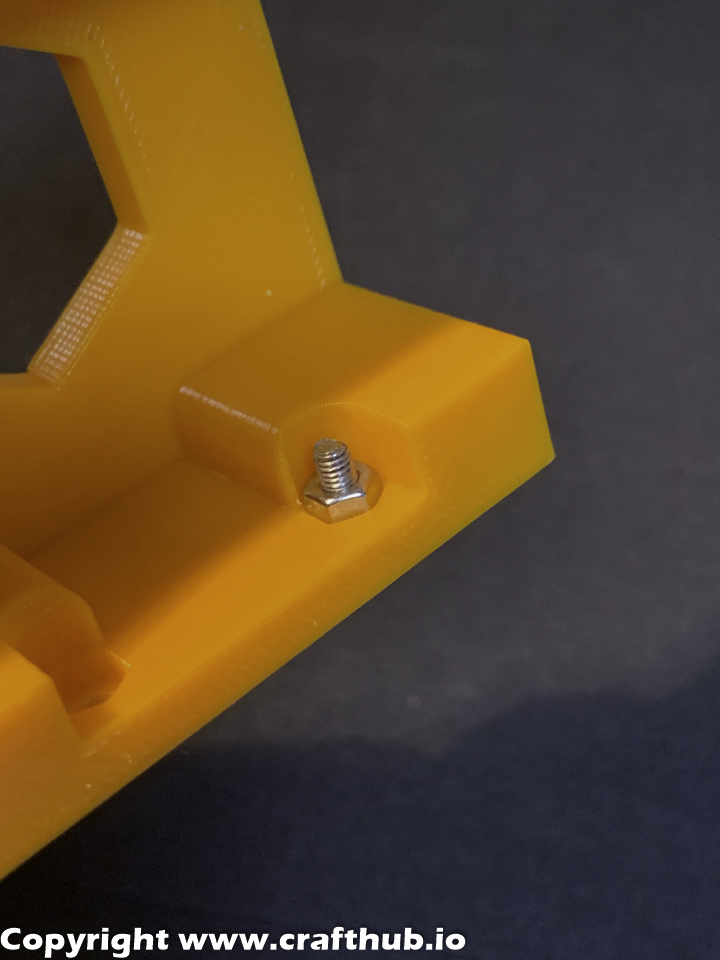
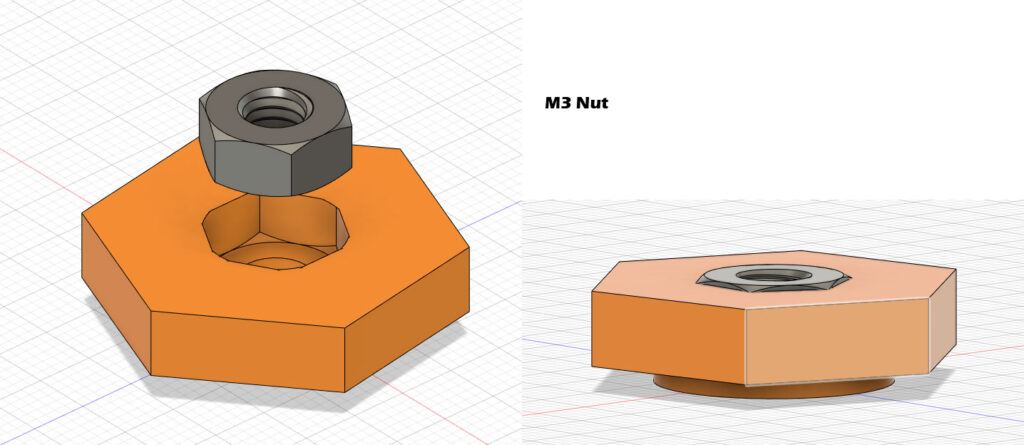
Use M3 screw, M3 Nut and gently insert to the M3 Nut position
Use the screw to pull the nut into M3 Nut position
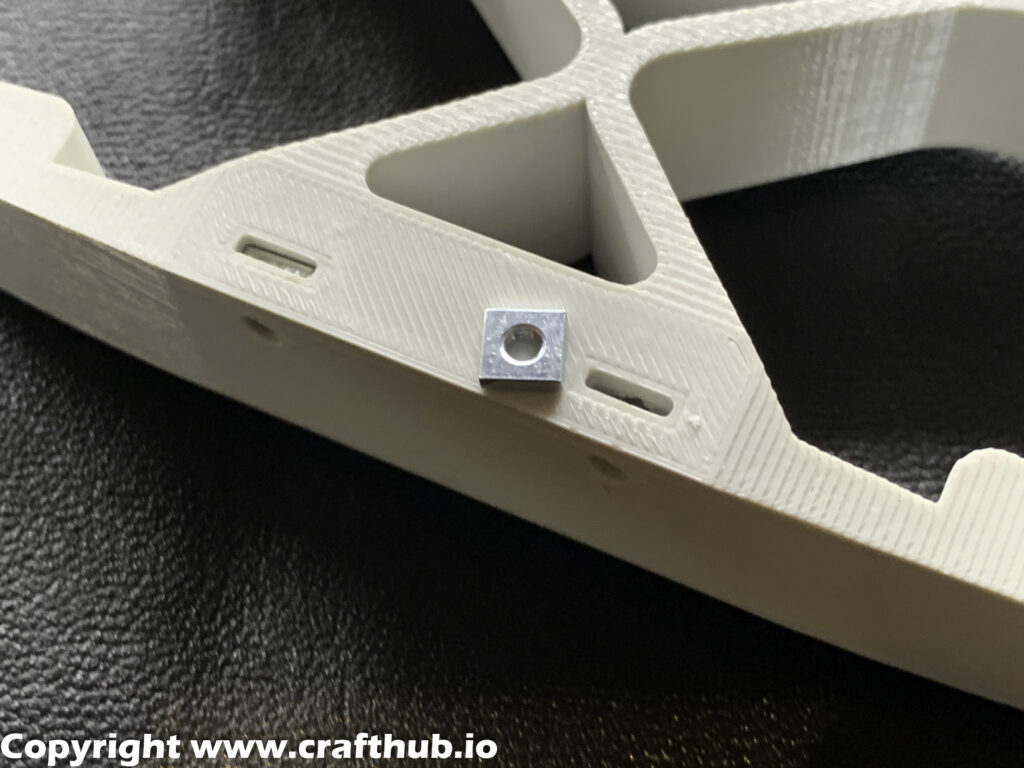
Insert Square nut into the slot.
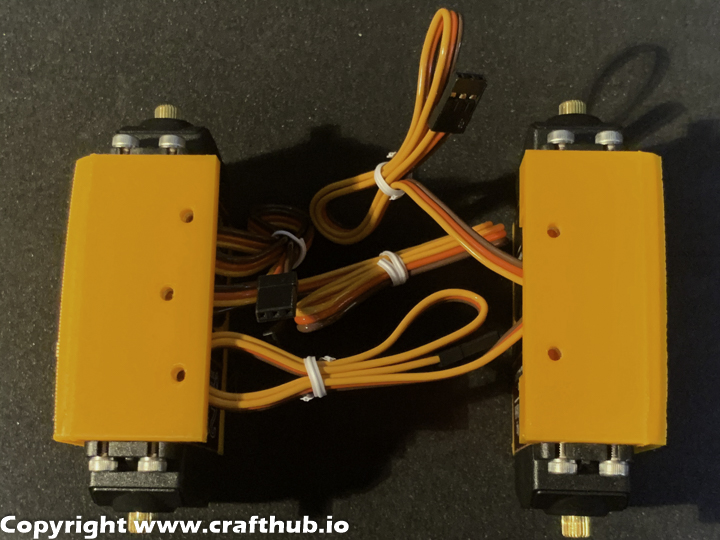
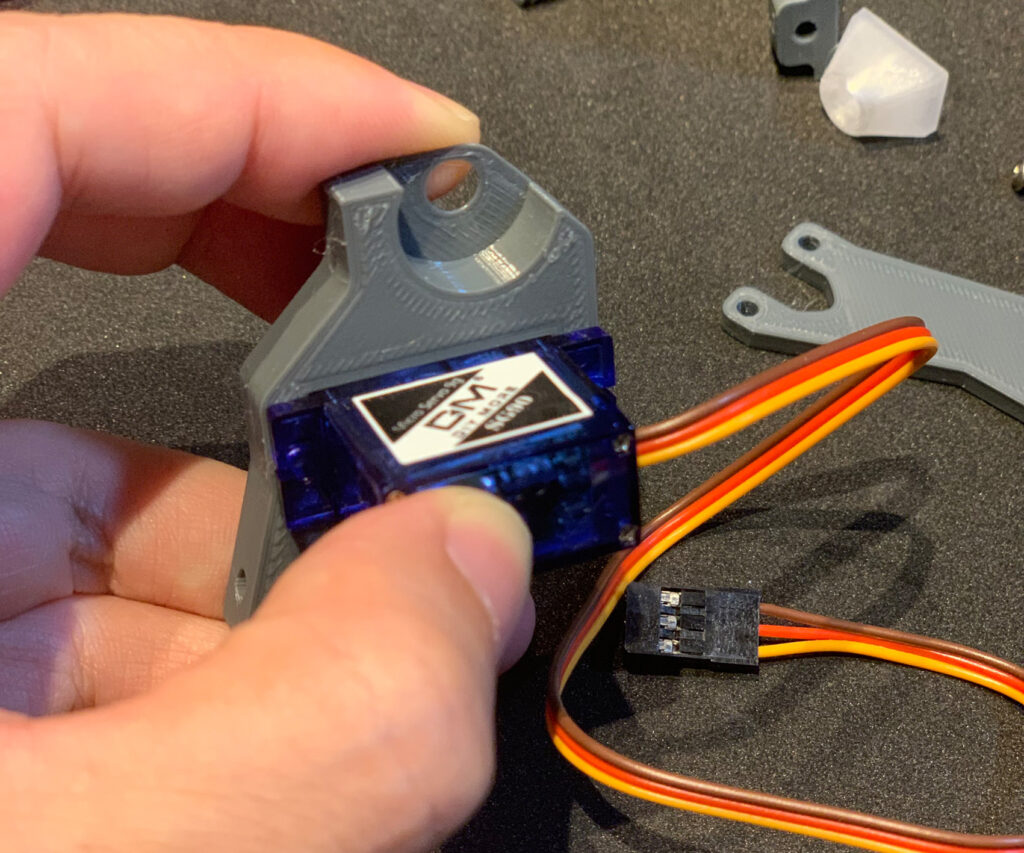
2, High Torque Servo installs
Only for this part, you have to use M3*6 screw, instead ofM3*10 screw to avoid not interfering with fixing the screw.
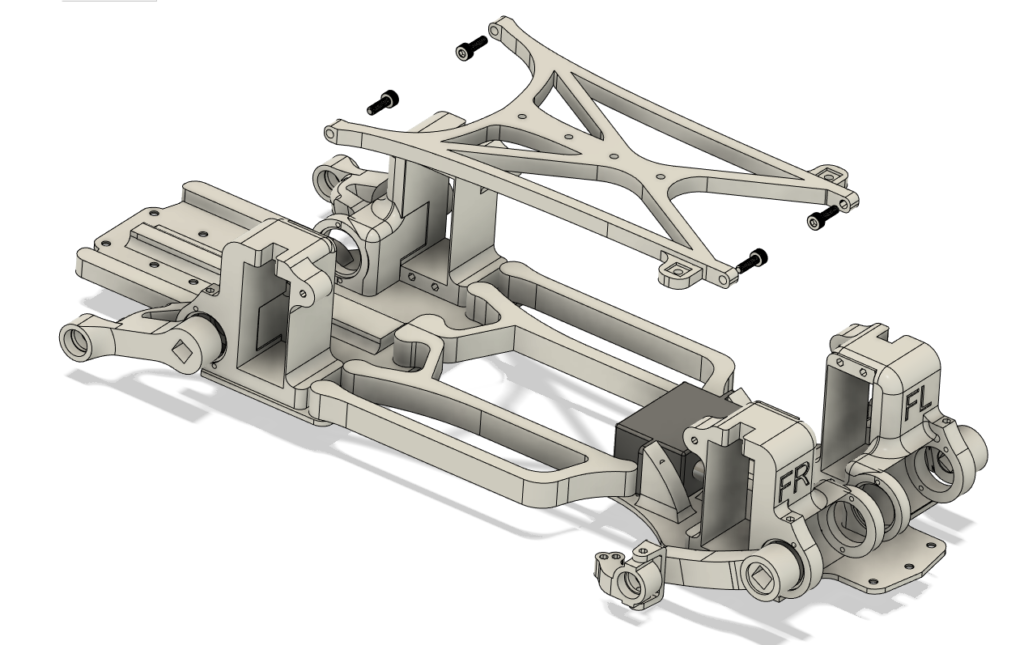
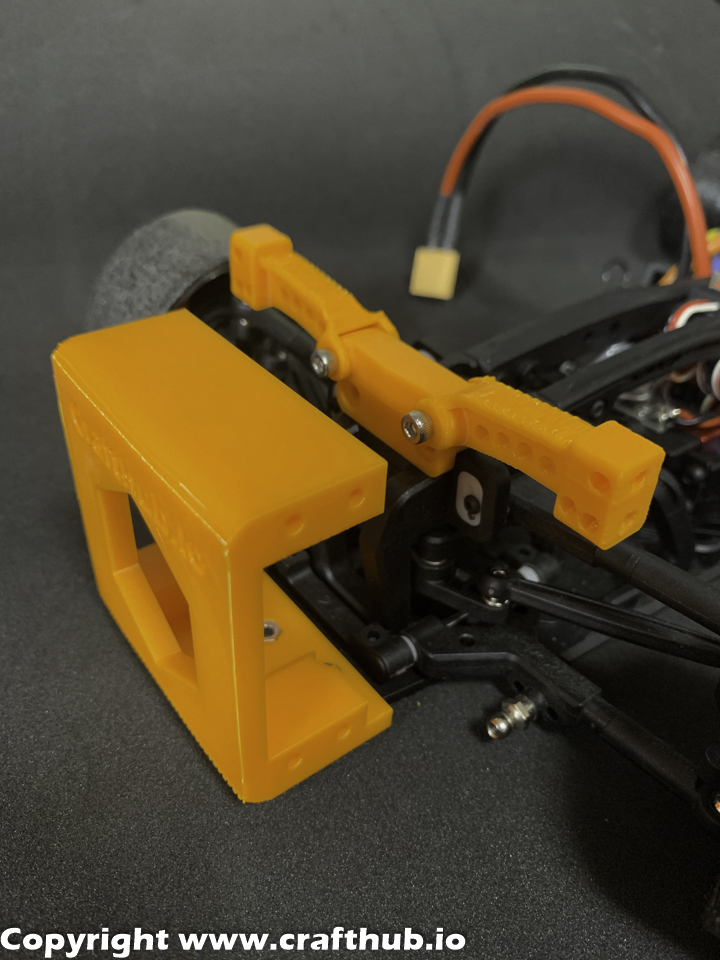
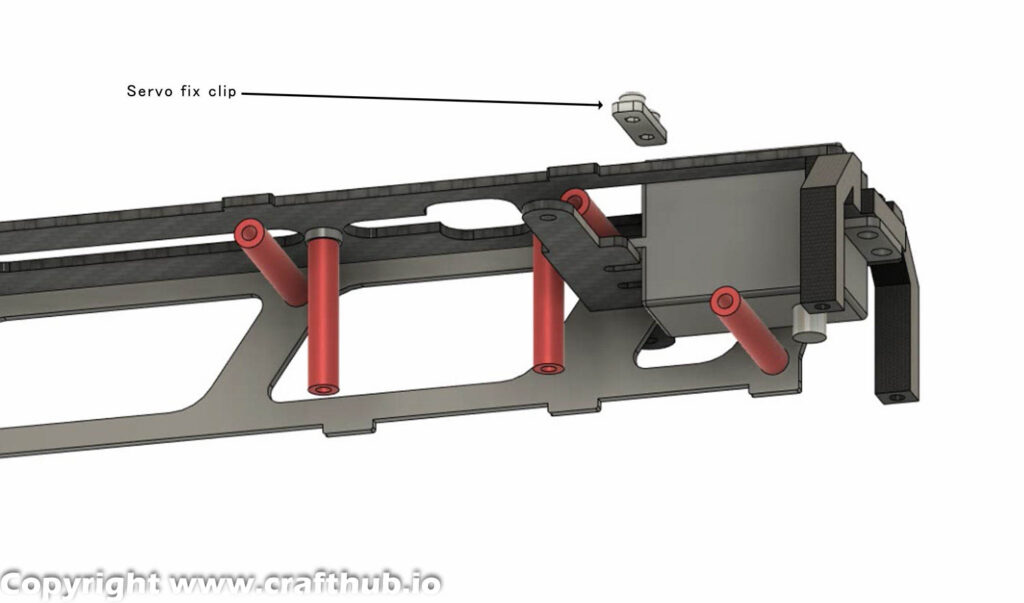
3, Remove the bumper
The Bumper fix screw is used to fix a servo Bracket
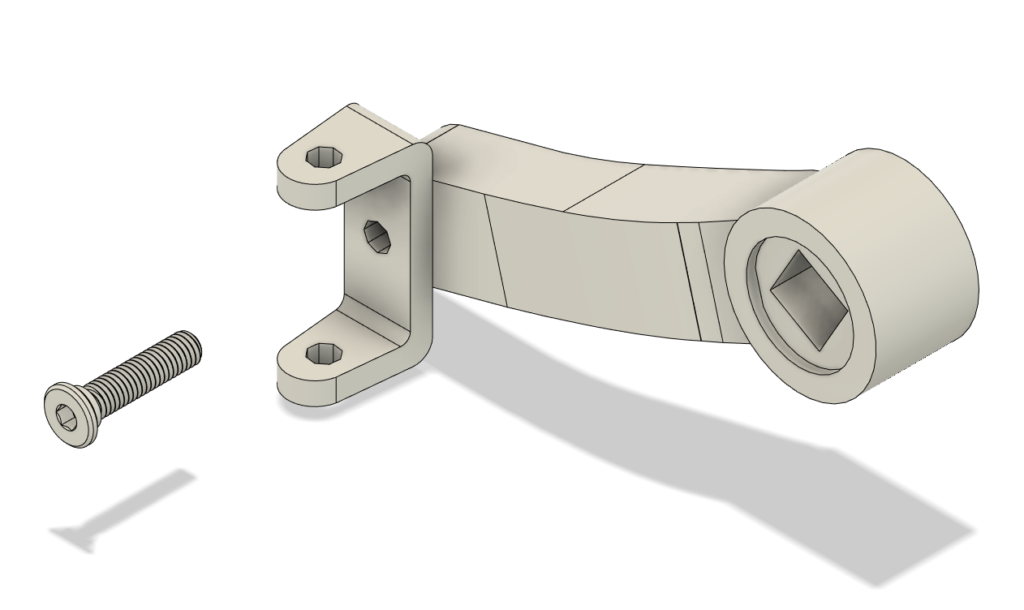
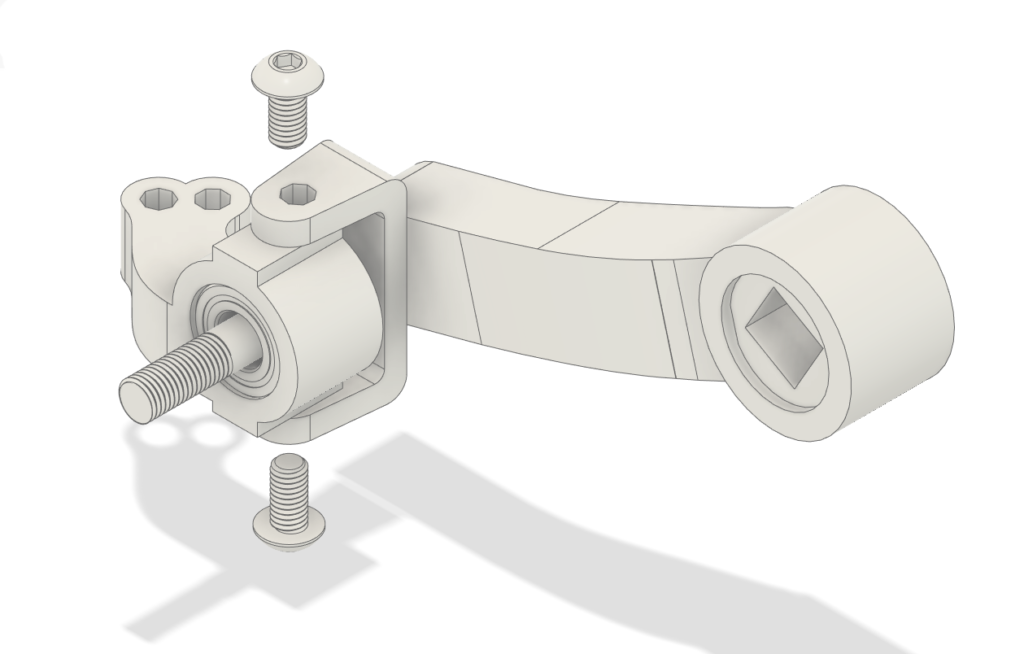
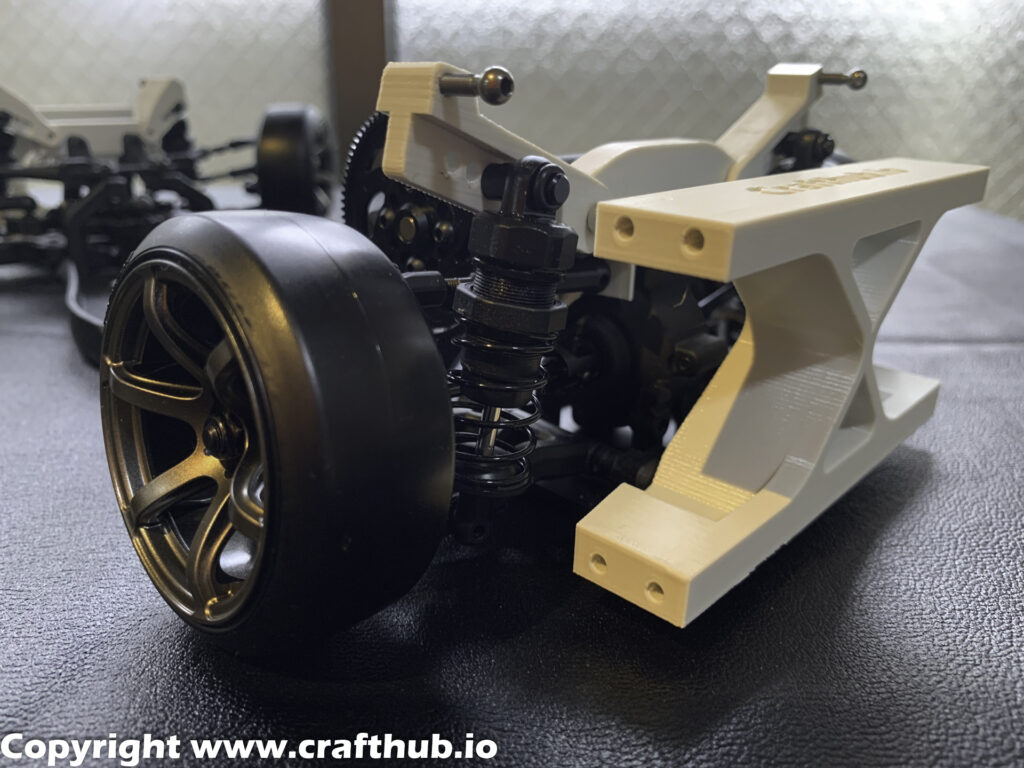
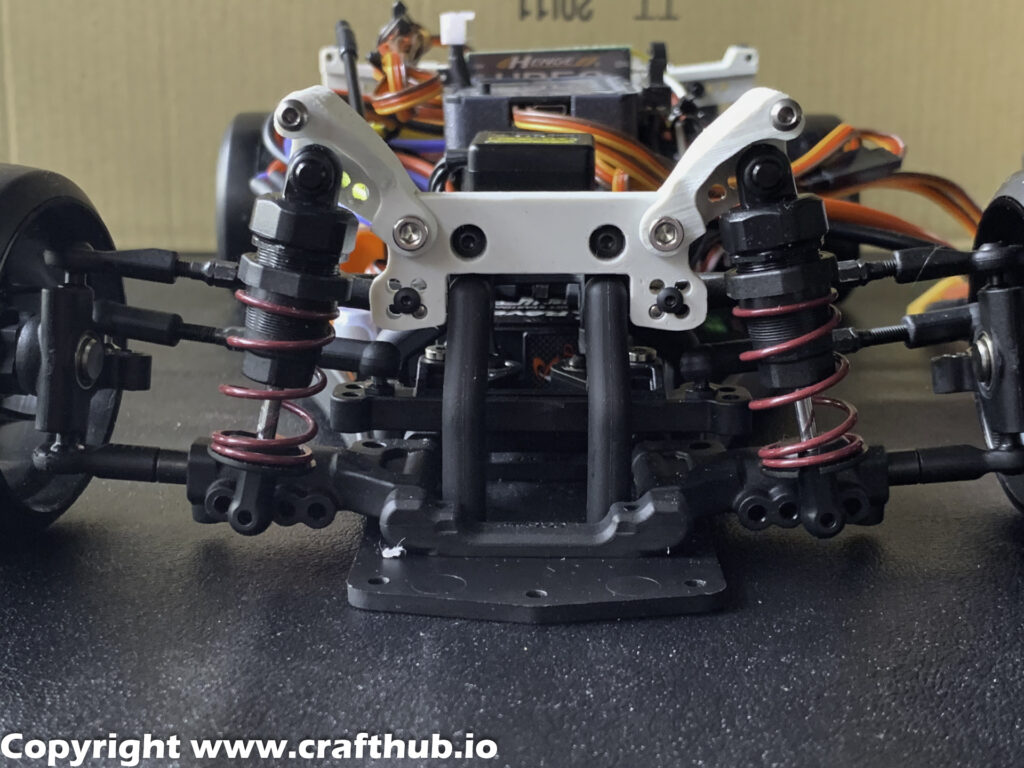
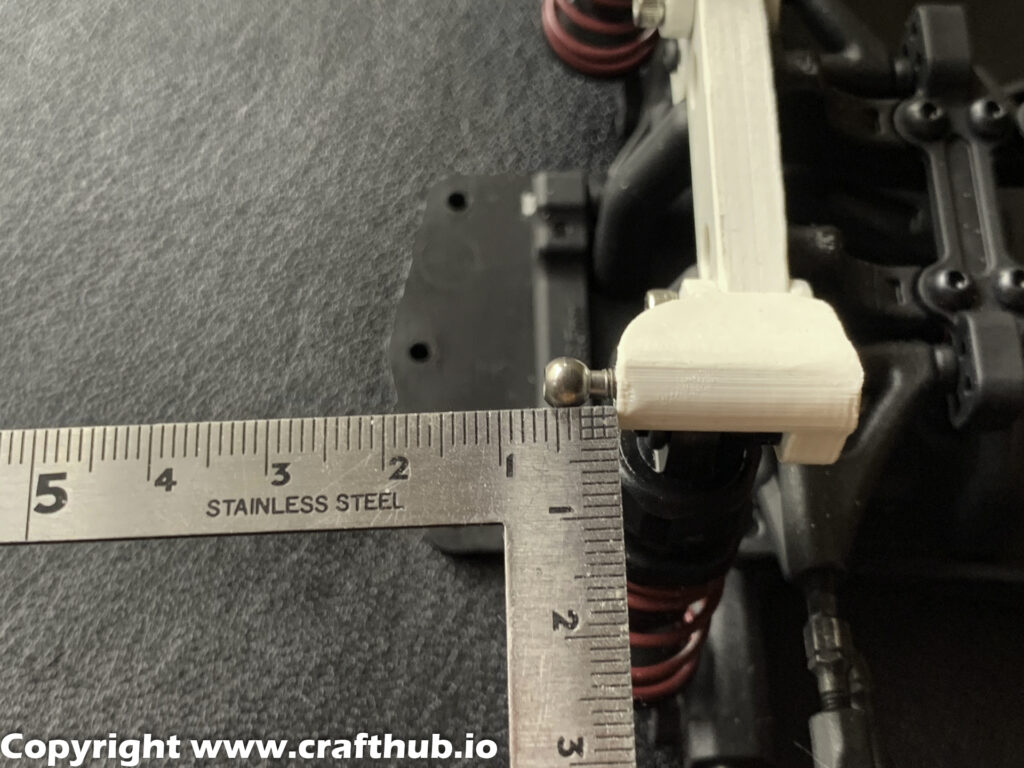
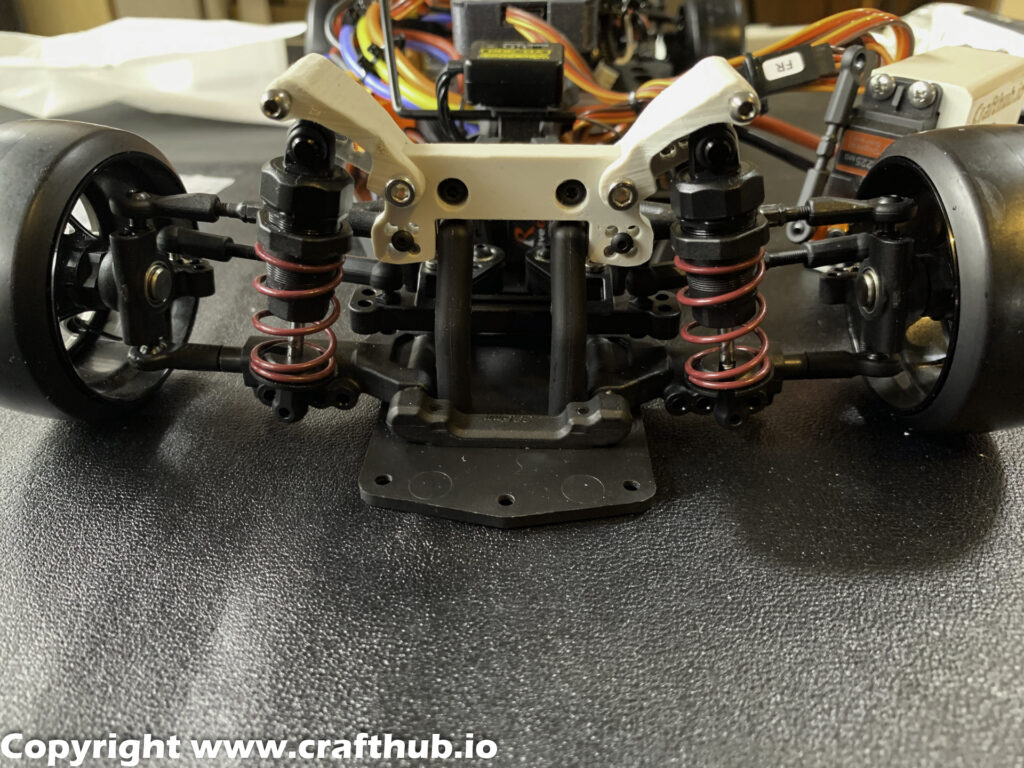
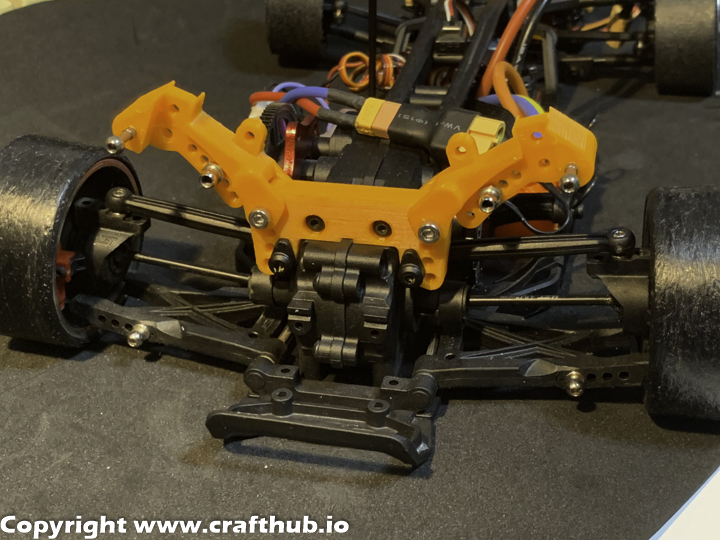
4, Swap the Strut tower bar(Front)
Front Strut (Remove the original Strut Tower)
Remove the ball end and fix it in the correct position Use a Tamiya Fluorne coated Stabilizer Ball connector set For the front, use this one.
Assemble the front Strut tower by adding M3*15 screws for the front. Do not over-tighten. Check for minimum play and movement.
The assembled strut tower needs a little bit of friction. If this part is too loose, the SS’s multiplier value can’t increase, and serious oscillation will occur and won’t stop. However, regular suspension linkage parts have to always be very smooth.
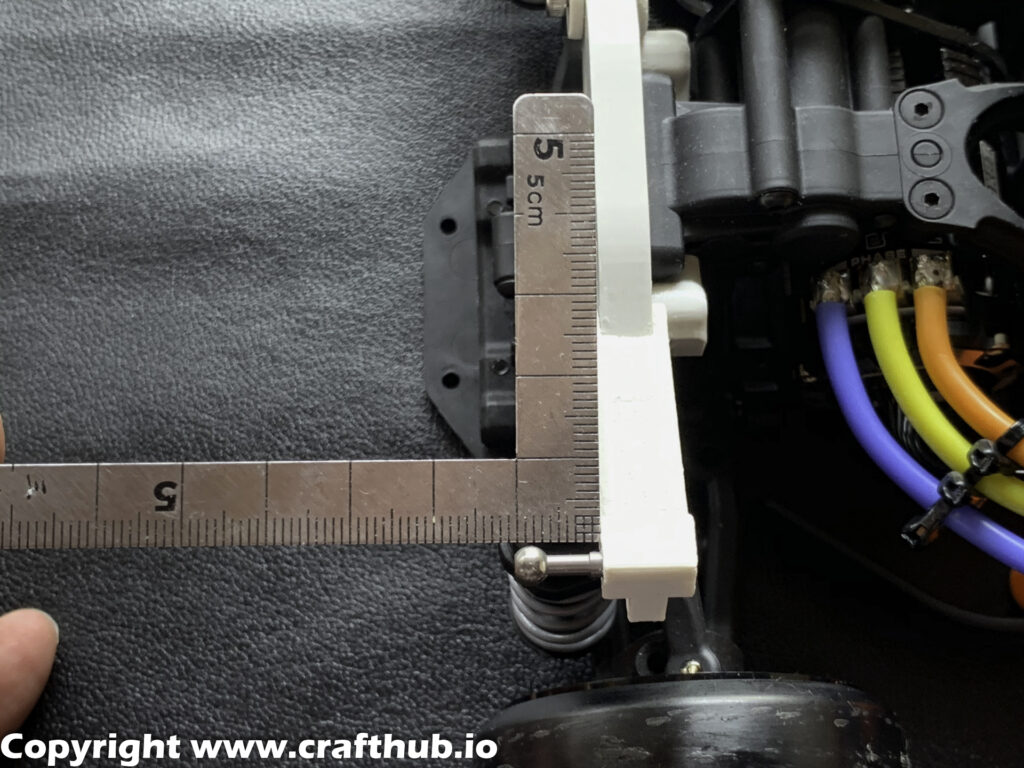
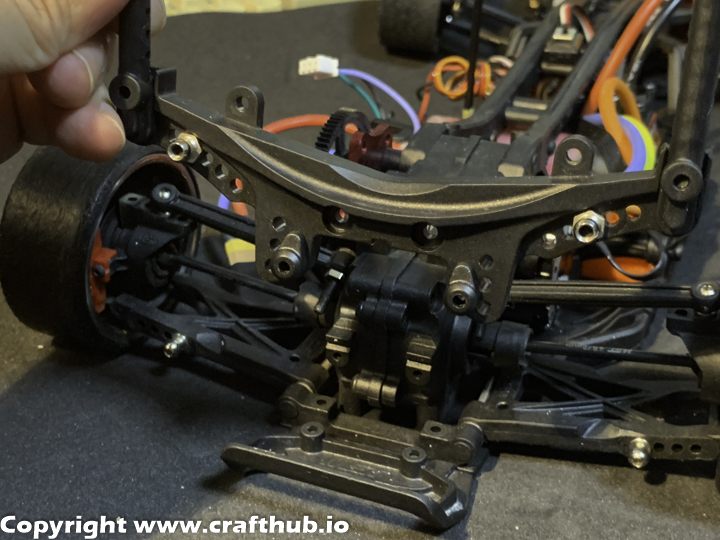
5, Swap the Strut tower bar (Rear)
For YD2E
For YD2S
Assembling the Rear Strut tower: (Assembled)
Use an M3*12 screw for the Rear. (Do not over-tighten)
Check minimum play (The arms should move easily.)
The assembled strut tower needs a little bit of friction. If this part is too loose, the SS’s multiplier value can’t increase, and serious oscillation will occur and won’t stop. However, regular suspension linkage parts have to always be very smooth. Use a Tamiya Fluorine coated Stabilizer Ball connector set For the Rear, use this one.
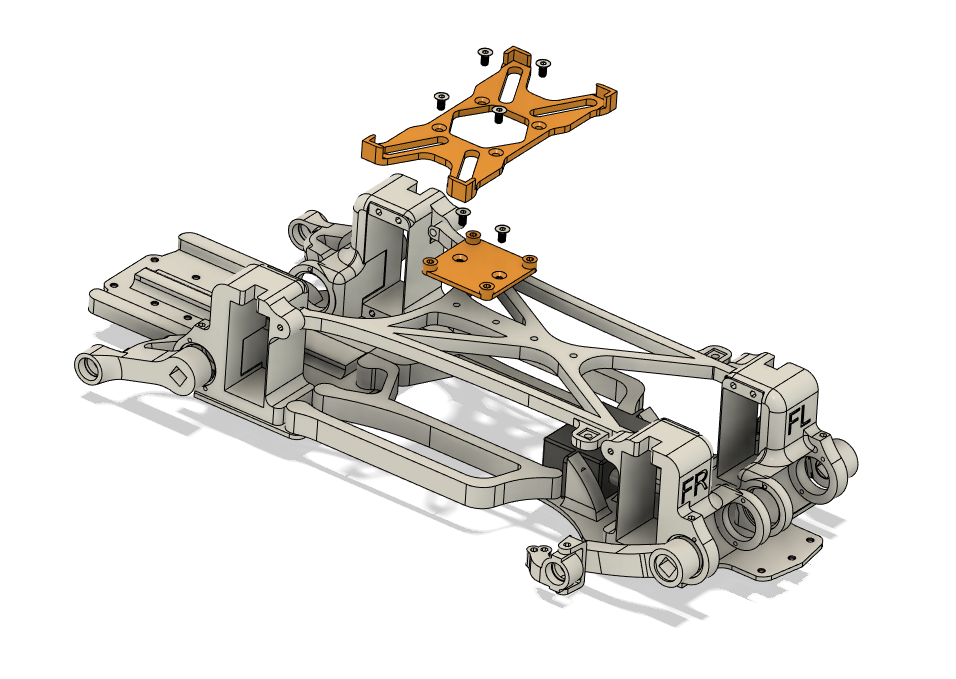
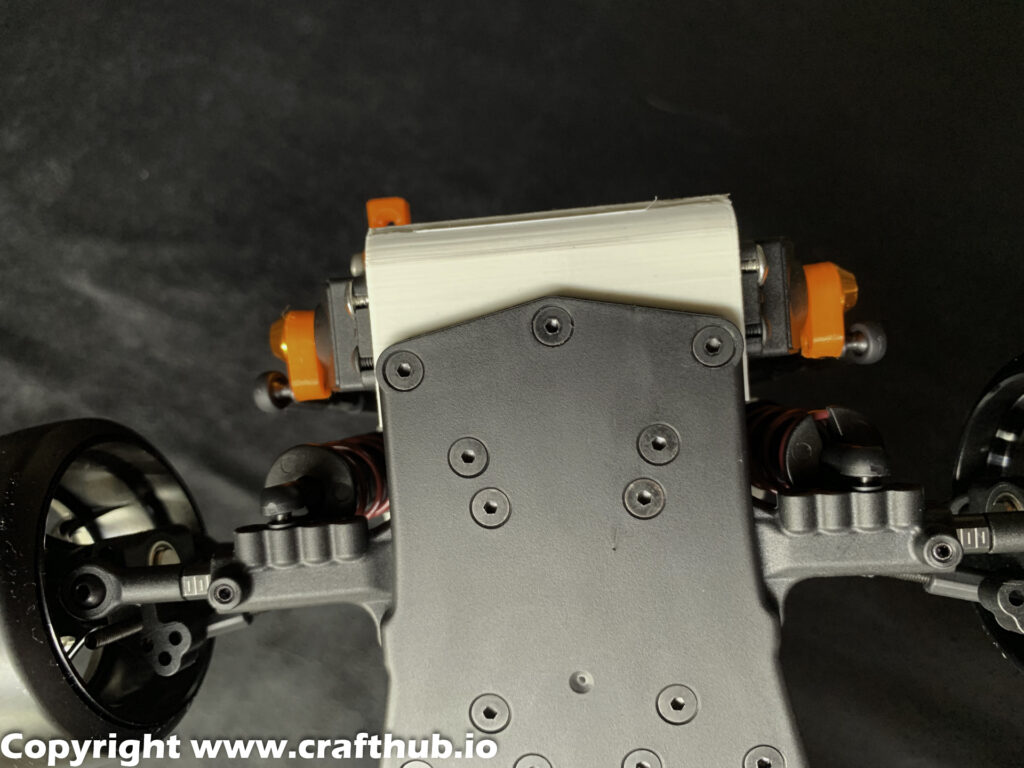
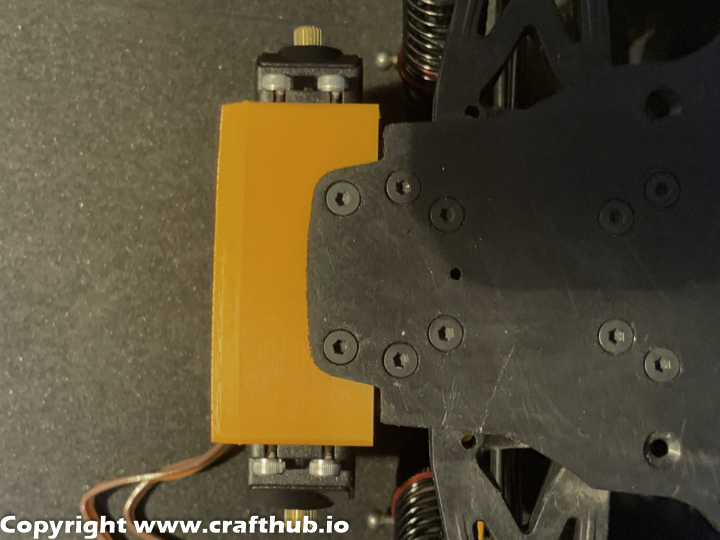
6, Mounting the servo holder
Front side
Use the screw that Yokomo original Bumperfix used.
The *Front servo holder has 3 screws. The rear servo holder has 2 screws.
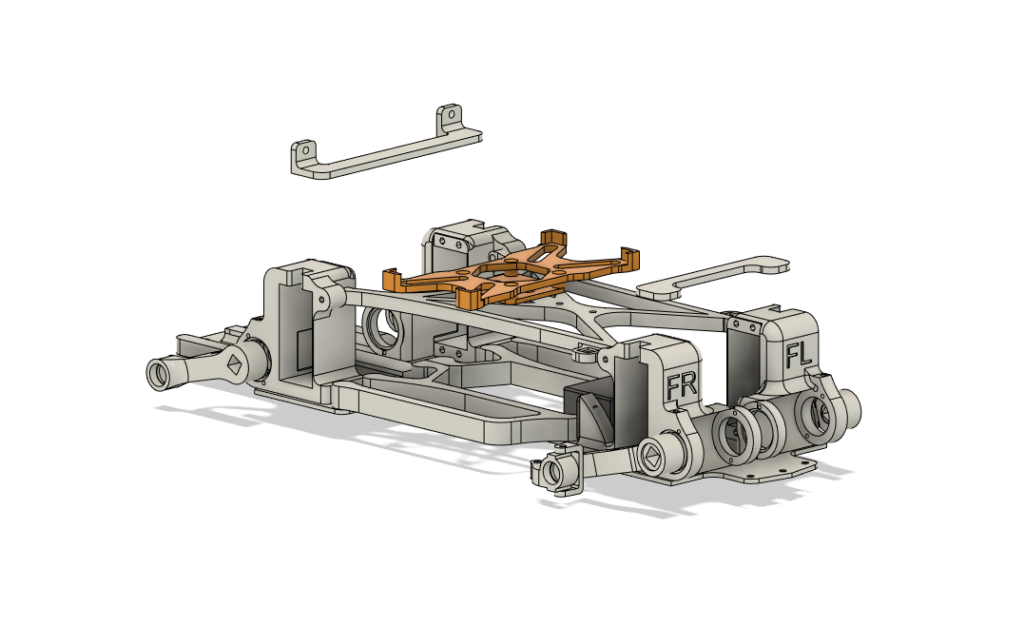
Rear Side
Remove the original bumper and replace it with the Servo holder.
About the Rear screw. Use the screw that yokomo originally used.
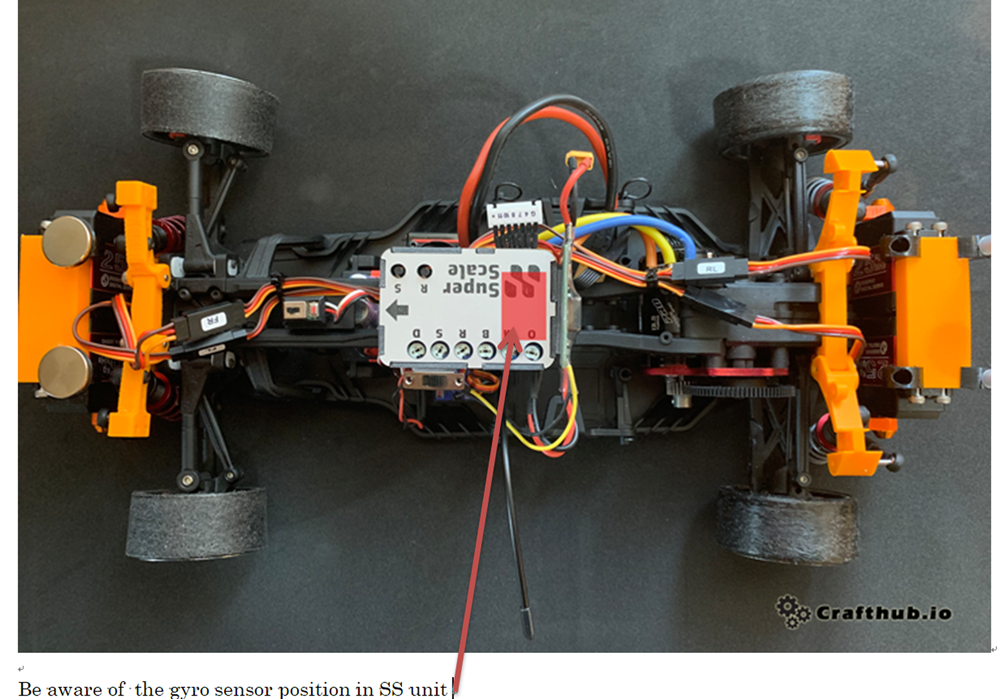
7, Initial setup of SS unit
Be aware of the gyro sensor position in SS unit
8, How to setup SS unit
You need to install Arduino configuration software. Please download from the link below.
You may download Arduino IDE software for your suitable platform. macOS or Win
Firmware needed from SuperScale2k20
SUPERSCALE_V1.2.ino.hex
*this firmware is pre-installed
Steering Gyro mount hole is used for antenna hold.
Step 1
First, connect the SS unit to the PC and set the offset to 0.
Next set BALANCE to 50.
The servo‘s neutral PWM value is almost 1500
FLpos 1500
RLpos 1500
*you should provide the power for SS Unit cause USB doesn’t provide enough power to move the servo neutral position.
Step2
Check all 4 servos in a neutral position, and then Set the servo horn like this.
Servohorn and endball fix with M3x8 cap screw
Step3
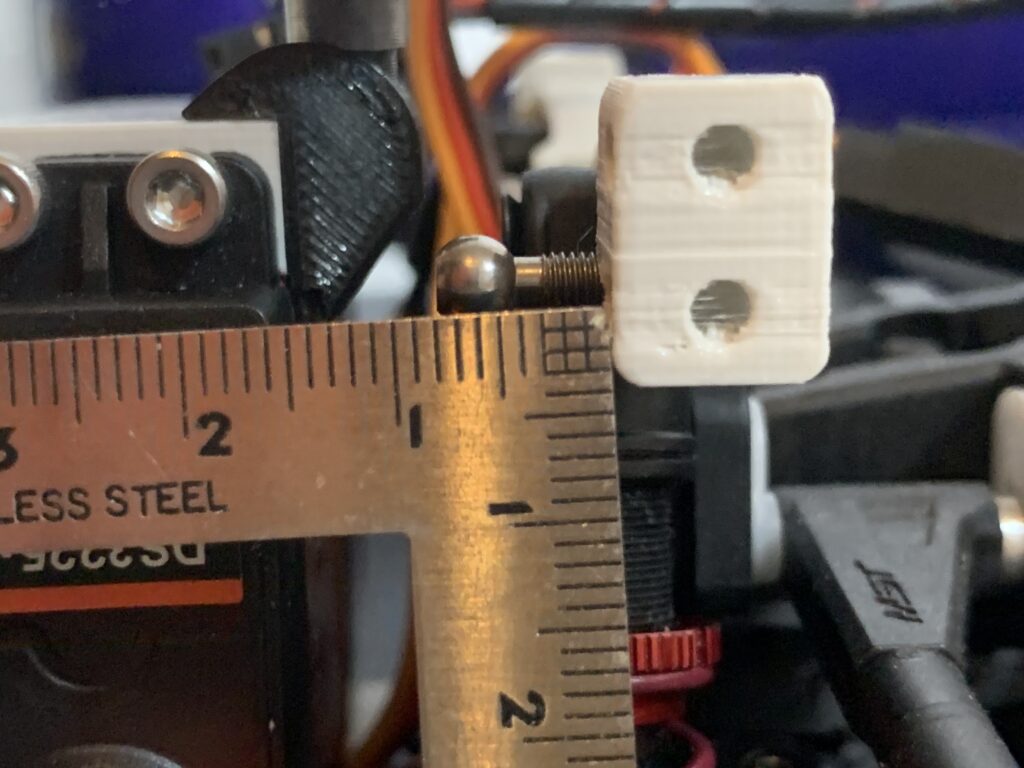
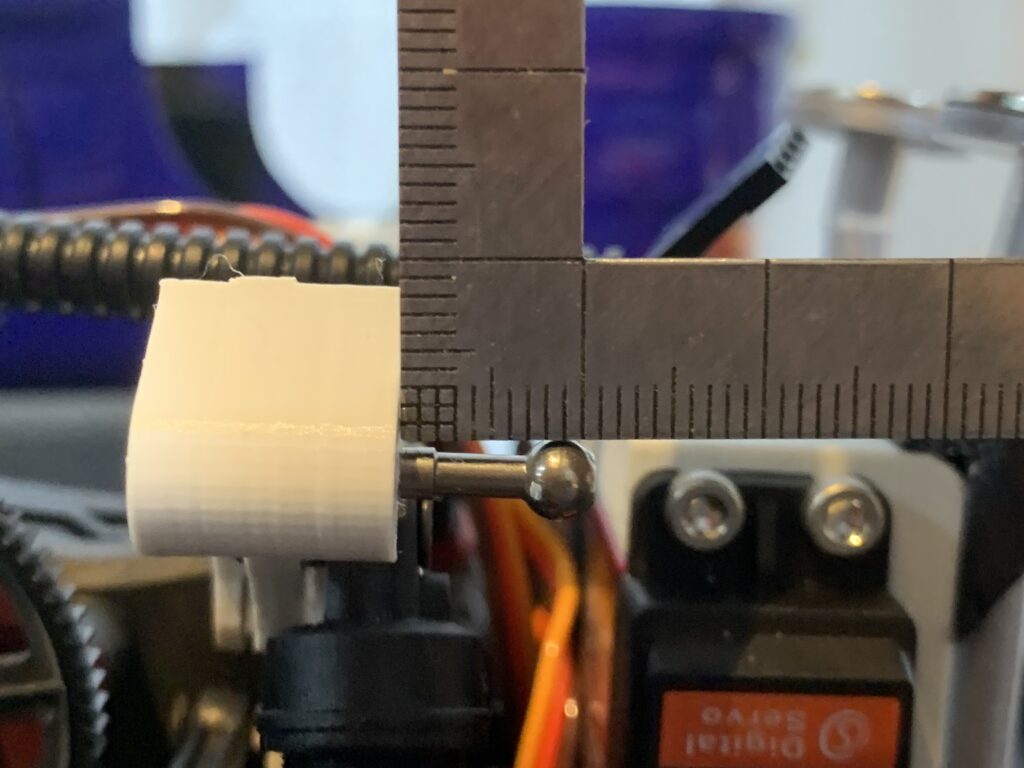
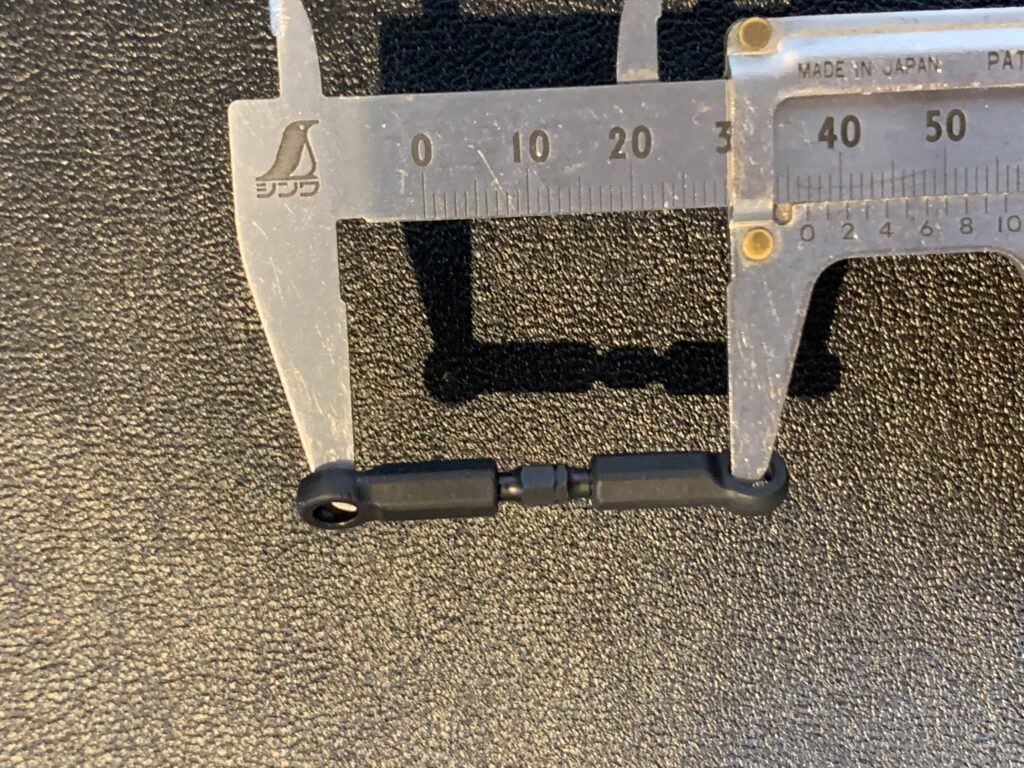
Adjust The turnbuckle length, and then connect the servo and Strut arm.
Front and Rear Rod Length
Front Rod length Front=41mm
RearRodLength
Rear=39.3mm
All about the physical setup is done, please test the sample setting value.
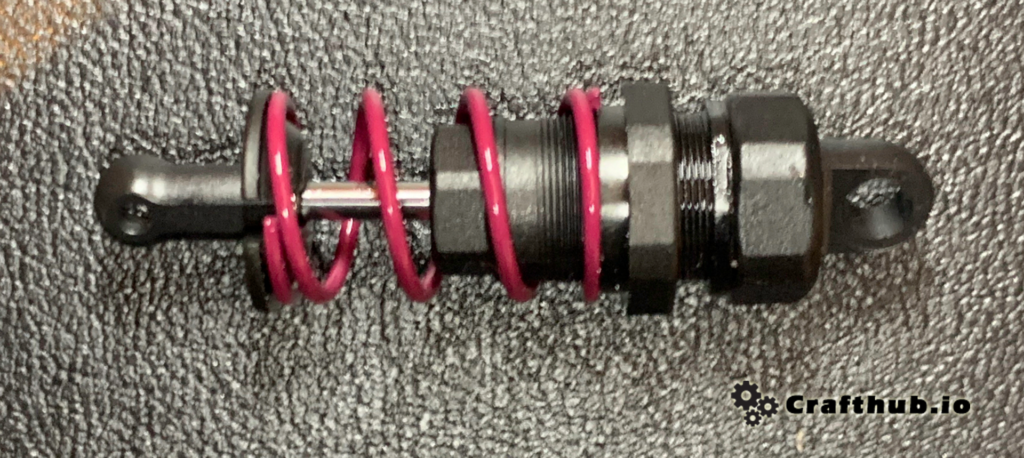
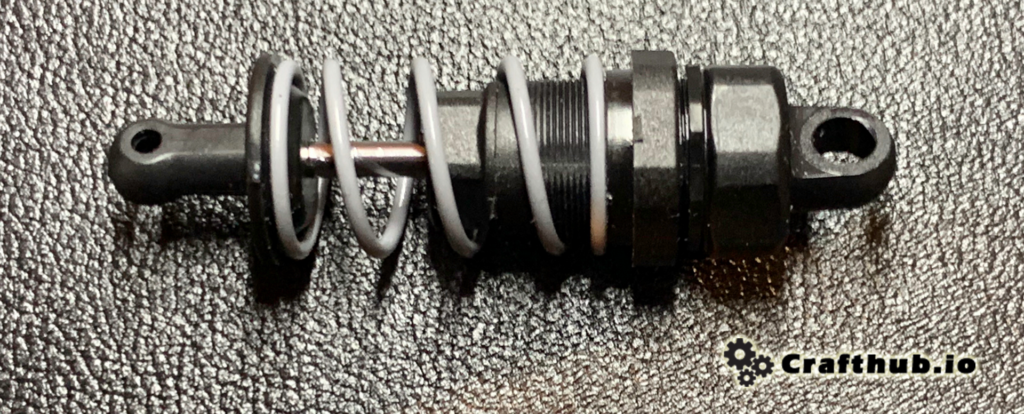
Spring preload
Front4mmRear 1mm
Yokomo YD-2 sample setup value
This is the start value to set up the active suspension
For more detail, please refer to SS unit manual.
Front Suspension Setting
Rear Suspension Setting
It will be better to change more high viscosity dumper oil.
Body mount kit
Body mount post parts have compatibility with Yokomo Genuine Body mount rod. You can use your suitable third-party body mount. Or make a hole in the body and fix the body using a Body pin.
Do not use this file for commercial purposes without any permission.
Disclaimer
This model was made with FDM 3Dprinter, the parts have some additive markings, however, no problem with those parts’ functions.
This kit is an STL Data kit for conversion of MSTRMX2.0 chassis with an active suspension system ”SuperScale2k20 SS Unit”.
Future
• Come with All of the printable parts, without SS unit. • Design for MST RMX2.0 • Active suspension and conventional suspension hybrid. • Simple and reliable, easy to swap design • Fully compatible original suspension geometry
What is contained in this kit?
What you need (items not included in kit)
Superscale2K20 SS unit kit
BEC unit
High torque Servo *4
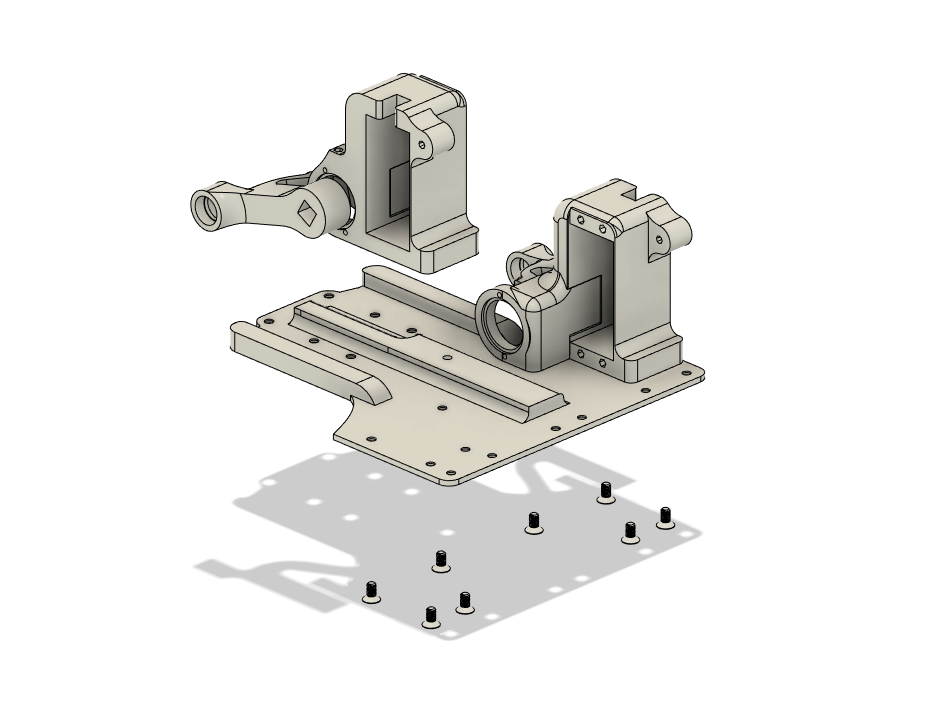
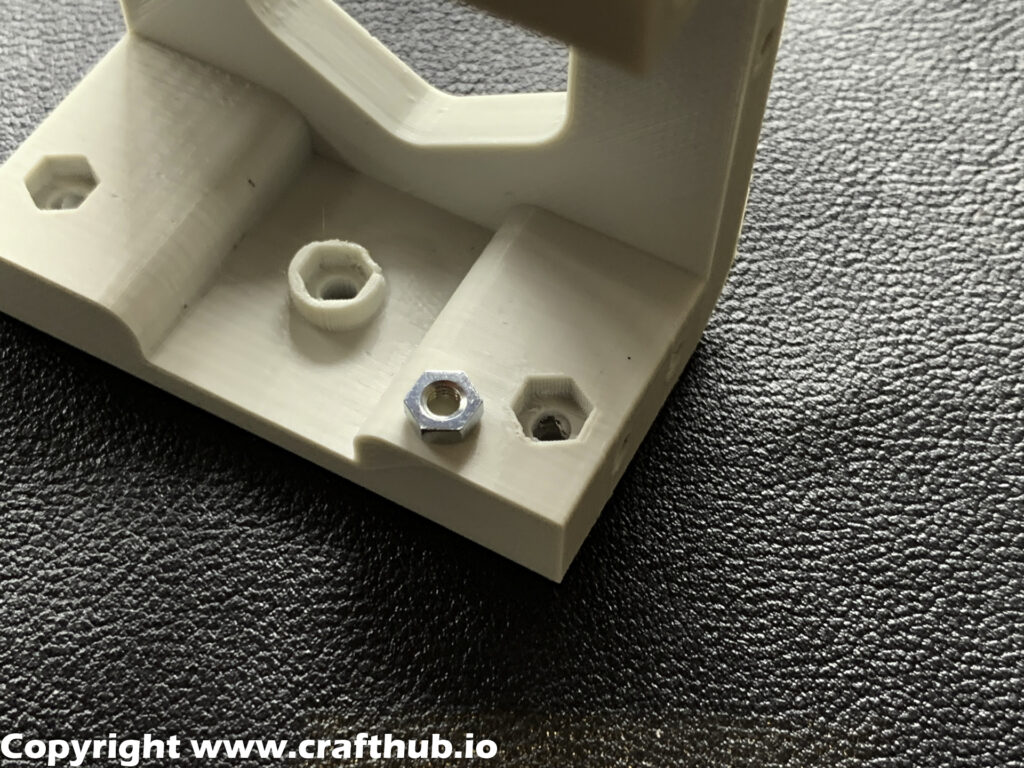
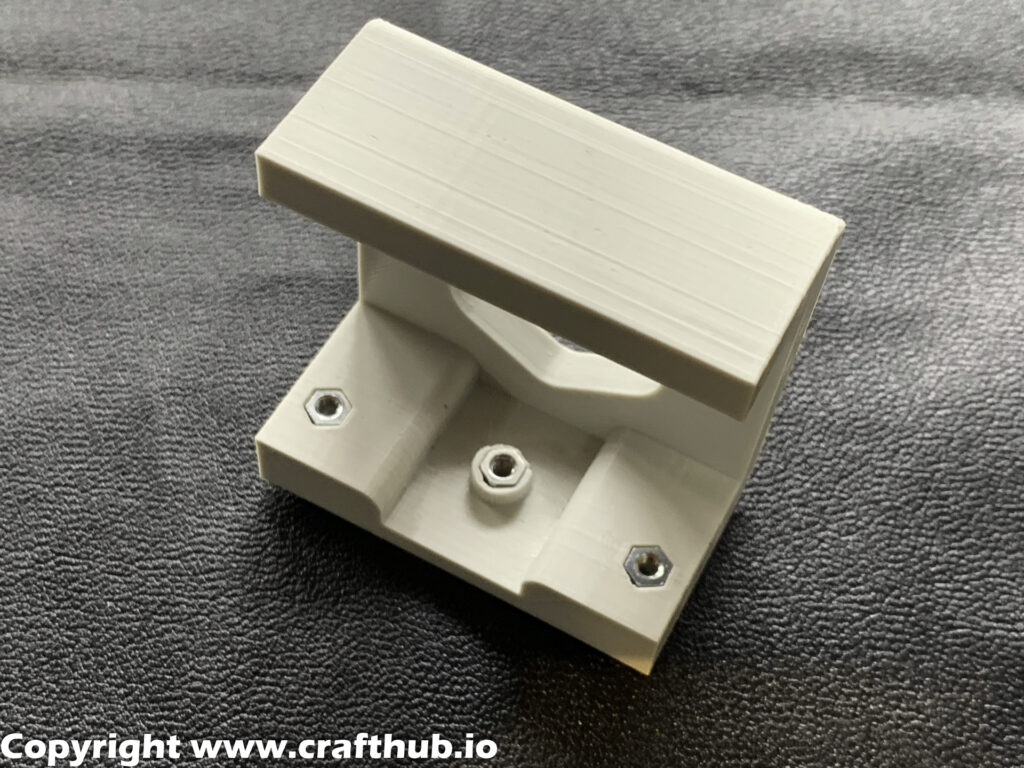
1, Installation
The M3 nut will be flush when it is installed correctly
Use the M3 screw, M3 Nut, and gently insert to the M3 Nut position.
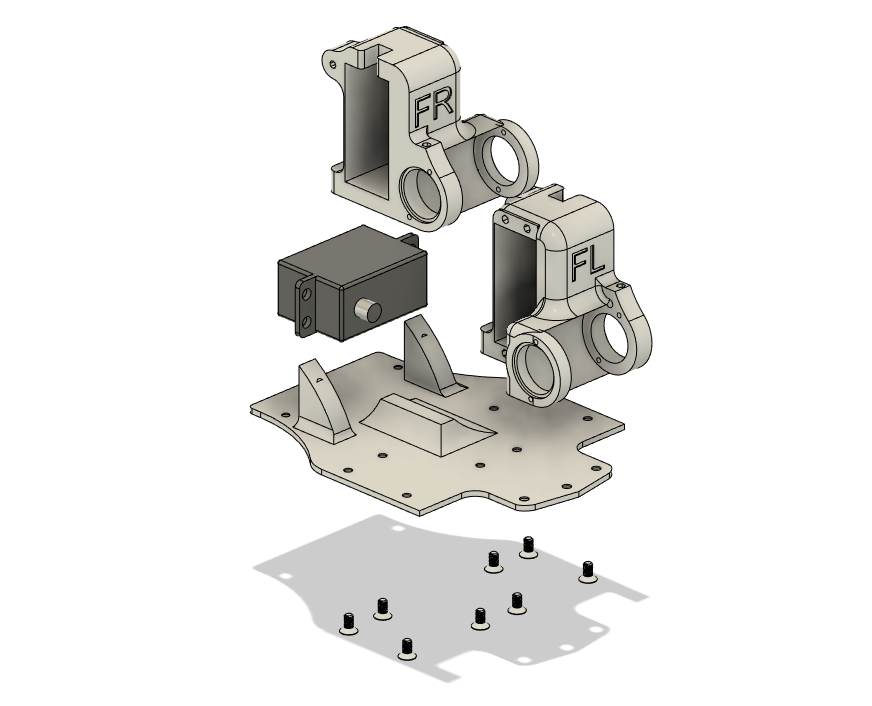
2, High Torque Servo installs
Use M3*10 CapScrew to screw servos to chassis mount brackets.
The mount screw hole size is 2.8mm and optimizes the tolerance for M3 screws. The Servo’s output shaft should be on the side closest to chassis mount holes.
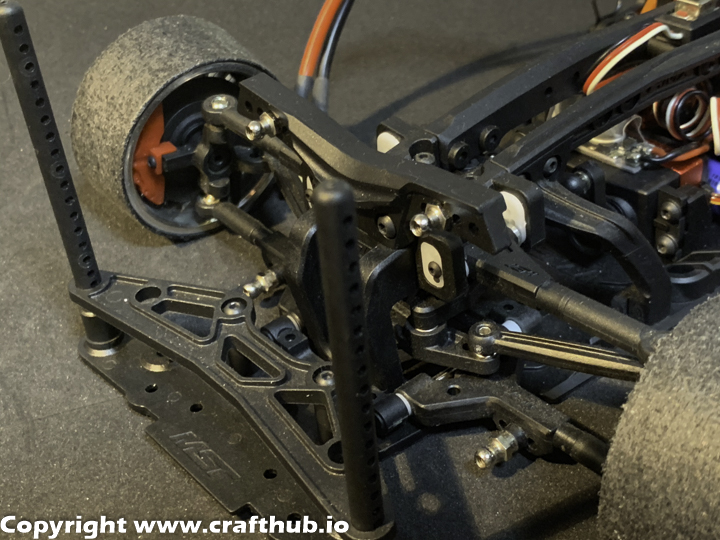
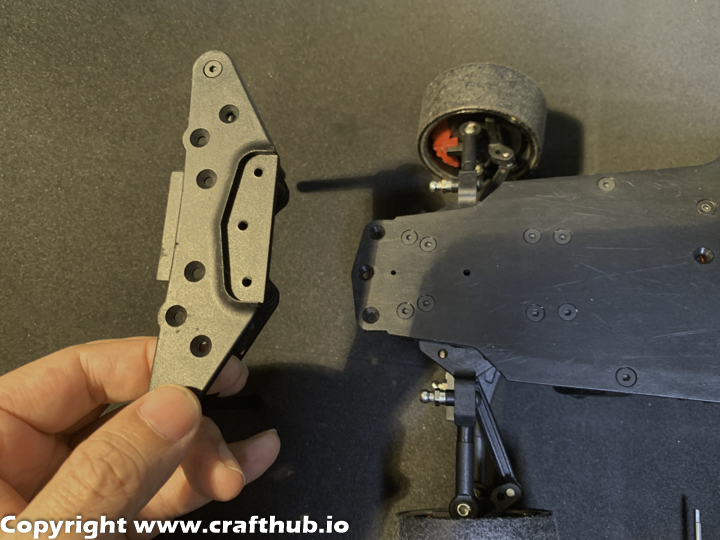
3, Remove the bumper
4, Swap the Strut tower bar(Front)
Remove the original Strut Tower. Remove the ball end and fix it in the same position
Use a Tamiya Fluorine coated Stabilizer Ball connector set For the front, use this one. (partsNo17)
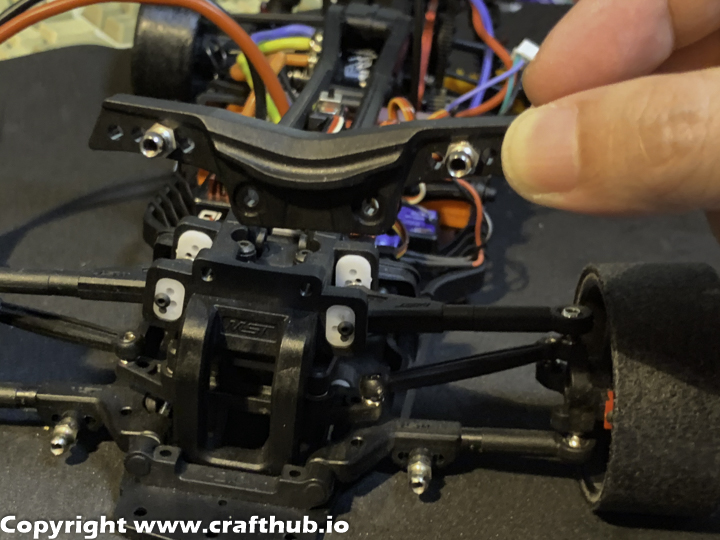
Assemble the front Strut tower by adding M3*15 screws for the front. Do not over-tighten. Check for minimum play and movement.
The assembled strut tower needs a little bit of friction. If this part is too loose, the SS’s multiplier value can’t increase, and serious oscillation will occur and won’t stop. However, regular suspension linkage parts have to always be very smooth.
5, Swap the Strut tower bar (Rear)
Assembling the Rear Strut tower: (Assembled)
Using M3*12 screw for the Rear. (Do not over-tighten) Check minimum play (The arms should move easily.)
The assembled strut tower needs a little bit of friction. If this part is too loose, the SS’s multiplier value can’t increase, and serious oscillation will occur and won’t stop. However, regular suspension linkage parts have to always be very smooth. Use a Tamiya Fluorine coated Stabilizer Ball connector set For the Rear, use this one. (partsNo17)
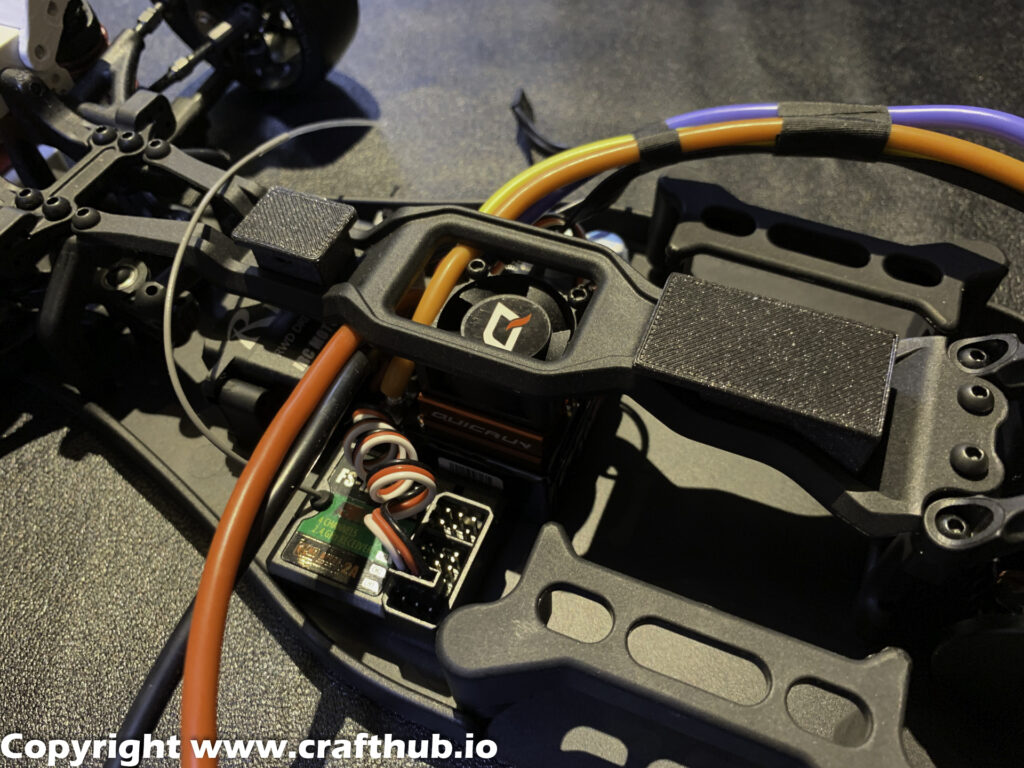
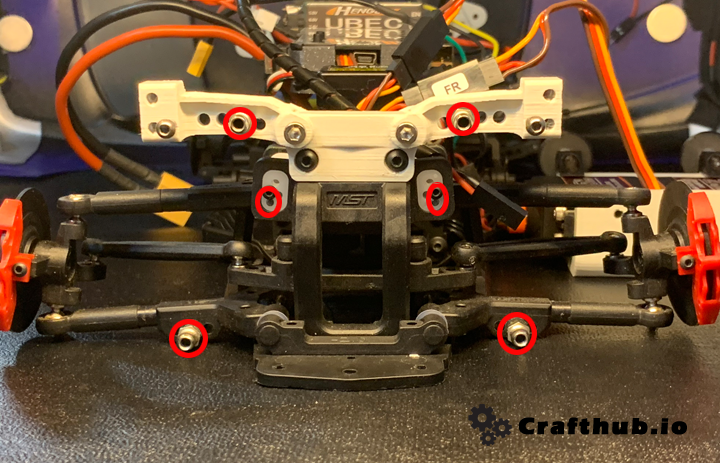
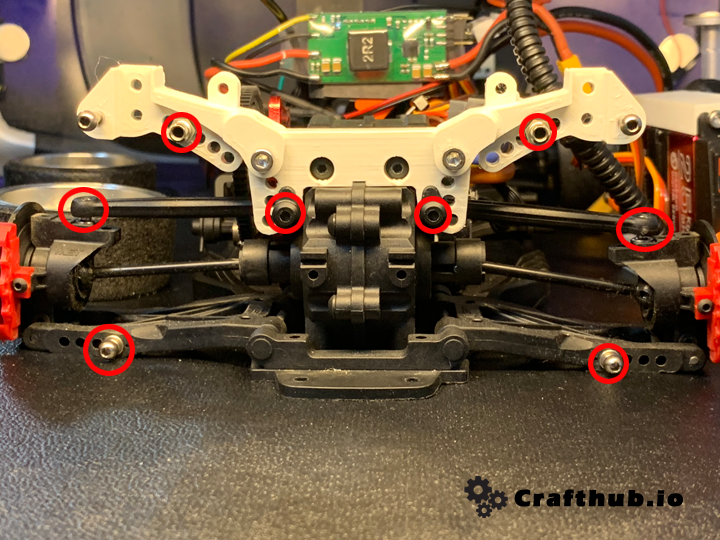
6, Mounting the servo holder
Front
Side screw use 3*15 Countersunk screw. For the center screw. Use the screw that MST originally used.
The *Front servo holder has 3 screws. The rear servo holder has 2 screws.
Rear
Remove the original bumper and replace it with the Servo holder. About the Rear screw. Use the screw that MST originally used.
7, Initial setup of SS unit.
Firmware needed from SuperScale2k20
SUPERSCALE_V1.2.ino.hex
*This firmware is pre-installed
8, How to setup SS unit
You need to install Arduino configuration software. Please download it from the link below.
You may download Arduino IDE software for your suitable platform. macOS or Win
SSunit setup Step1
First, connect the SS unit to the PC and set the offset to 0.
Next set BALANCE to 50.
The servo‘s neutral PWM value is almost 1500
FLpos 1500
RLpos 1500
*you should provide the power for SS Unit cause USB doesn’t provide enough power to move the servo neutral position.
Step2
Check all of the 4 servos in the neutral position, and then Set the servo horn like this.
Servohorn and endball fix with M3x8 cap screw.
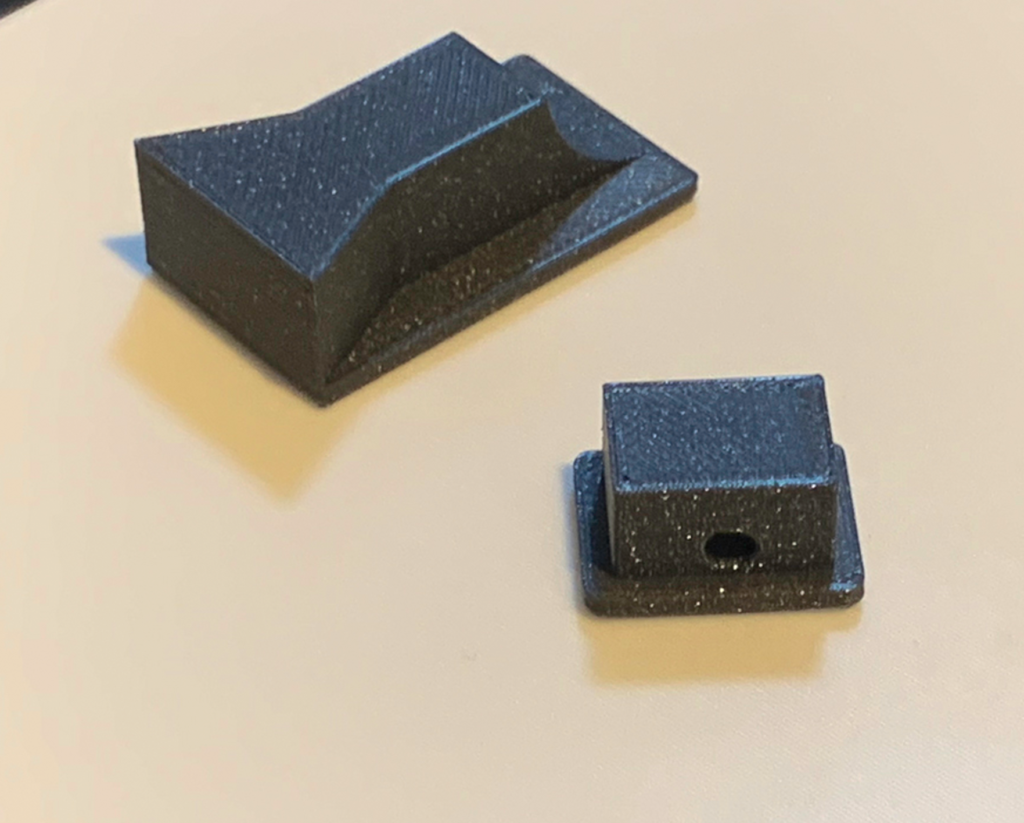
This hone has a tapered servo shaft connection, so any spline servo can perfectly fit this servo horn. so this servo horn material is PETG. Use with Tapered washer like in the photo.
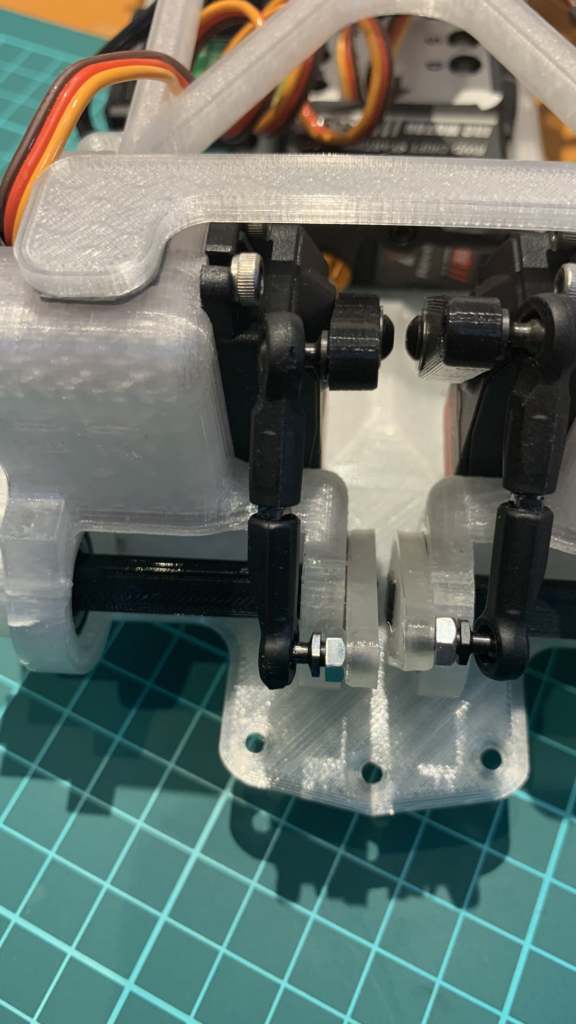
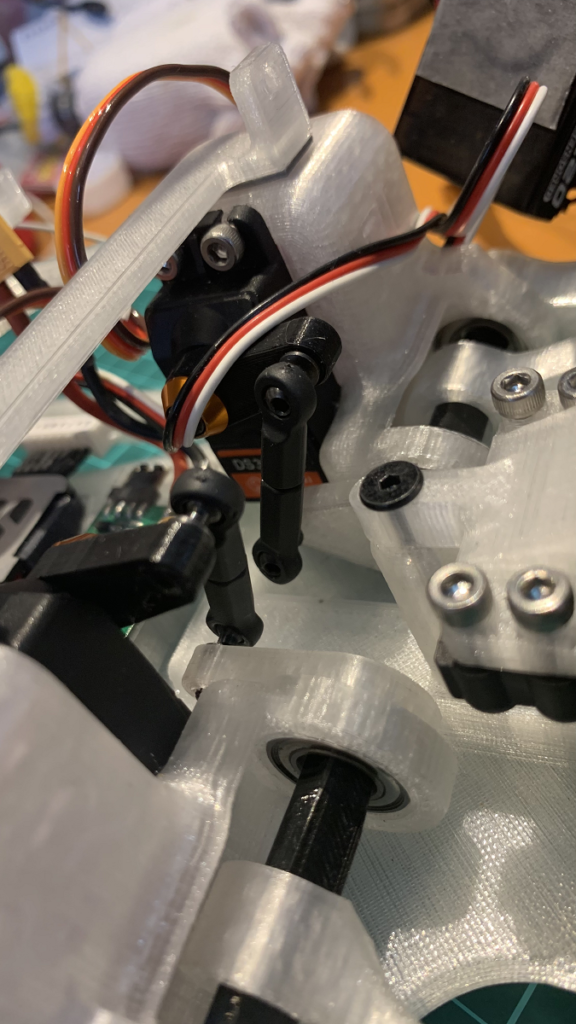
Step3
Adjust The turnbuckle length, and then connect the servo and Strut arm.
front=34mm
Rear=37mm
All about the physical setup is done, please test the sample setting value.
MST sample setup value
This is the start value to set up the active suspension
For more detail, please refer to SS unit manual.
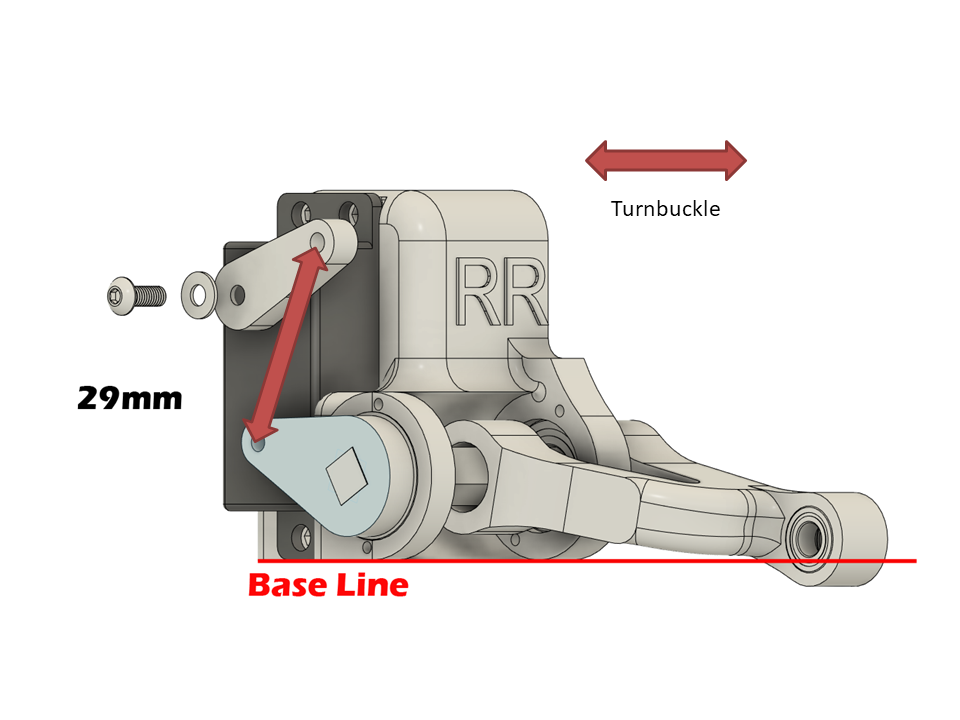
Front side ball end position
Rear side Ball end position
It will be better to change more high viscosity dumper oil.
Ver2
Ver 2 servo holder is an integrated body holder
Disclaimer
Do not use this file for commercial purpose without any permission.
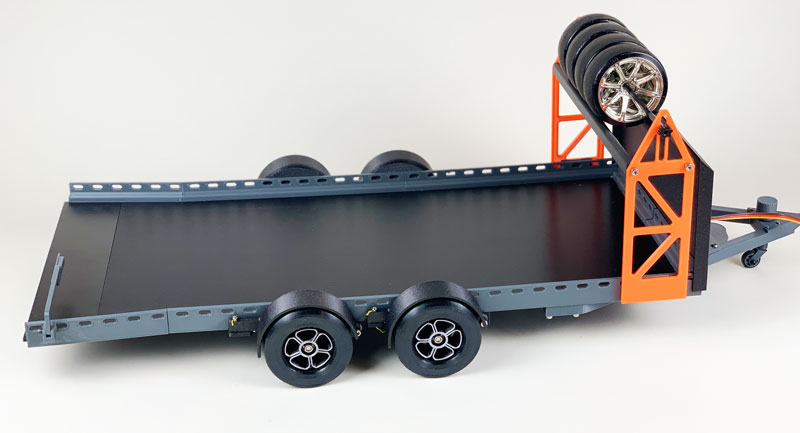
Yokomo 4.8mmφ Ballend can use a tow vehicle coupler.
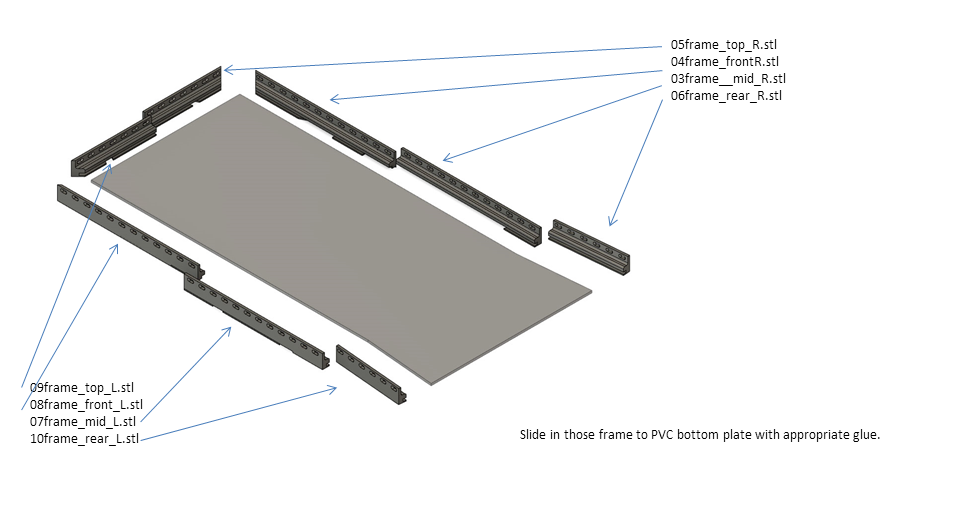
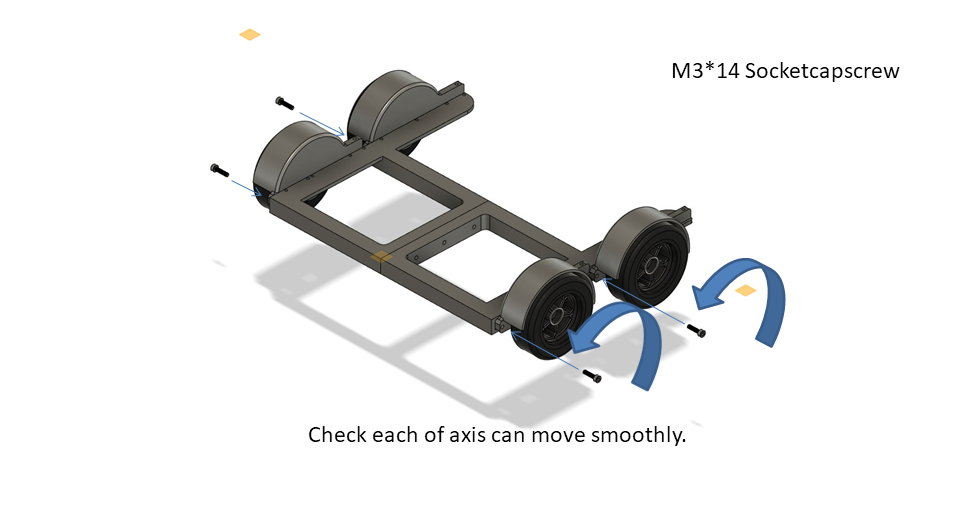
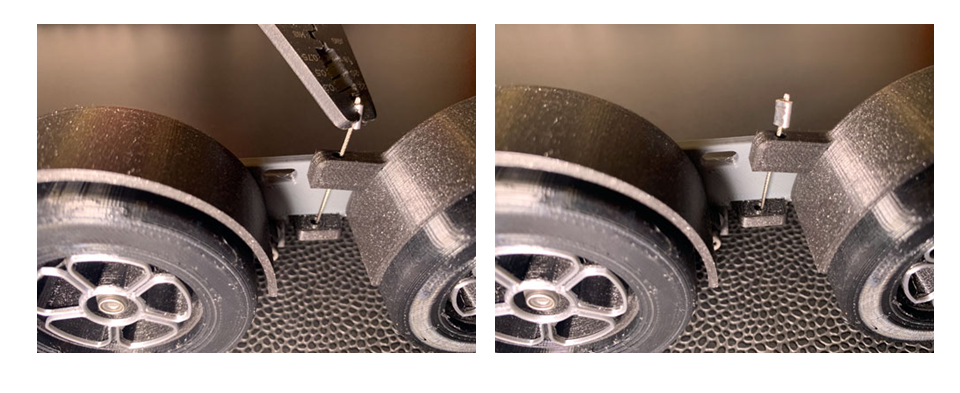
Assemble9
Assemble10
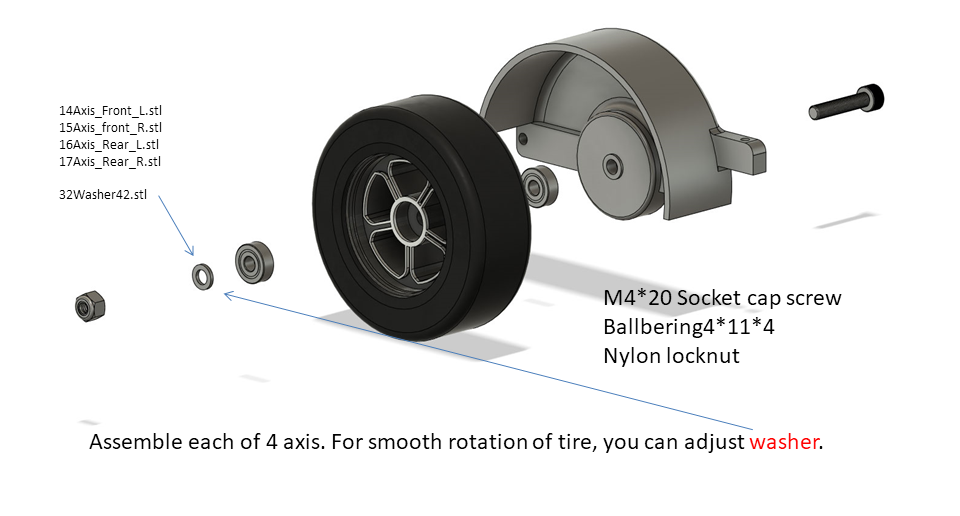
Assemble each of 4 axes. For smooth rotation of the tire, you can adjust it with a washer.
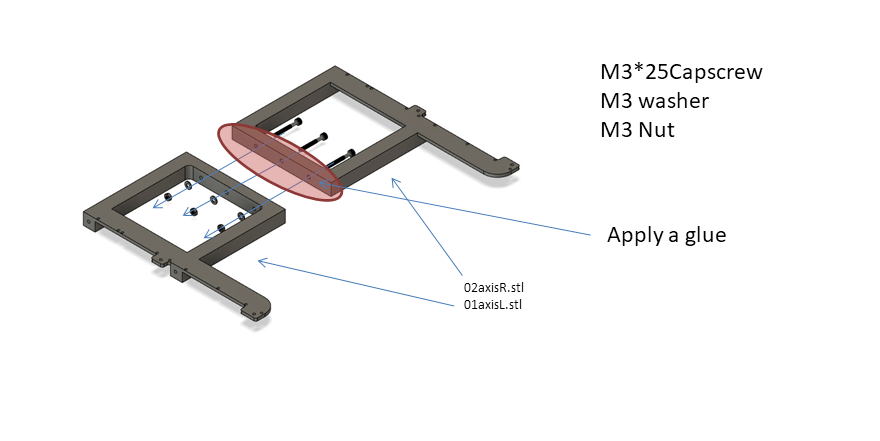
Assemble11
Assemble12
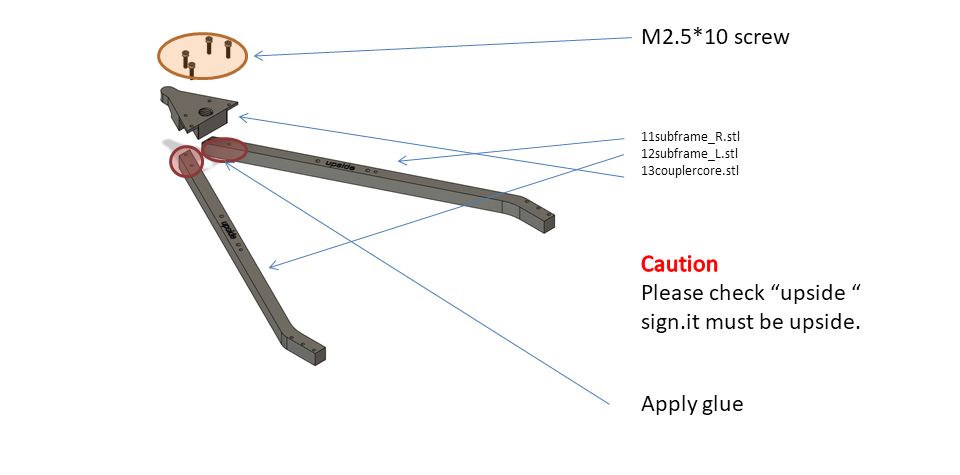
Assemble13
Assemble14
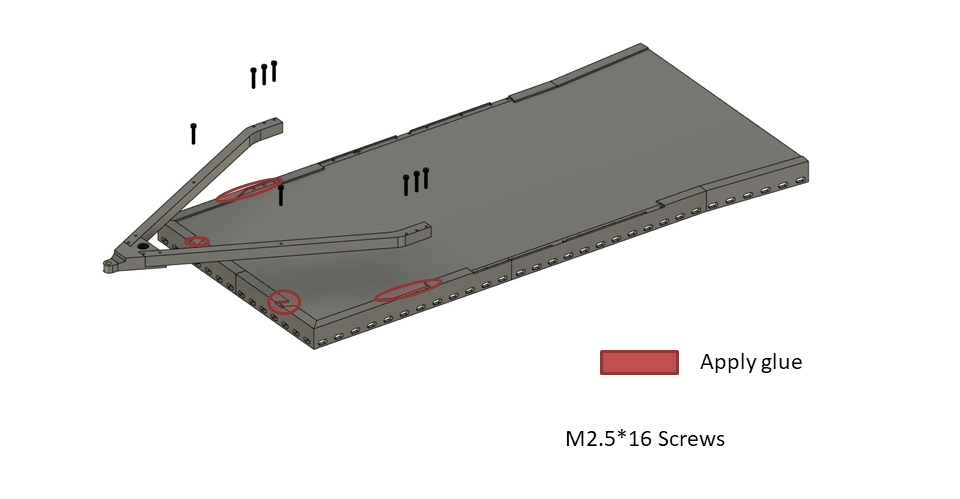
Assemble15
Assemble16
Assemble17
Assemble18
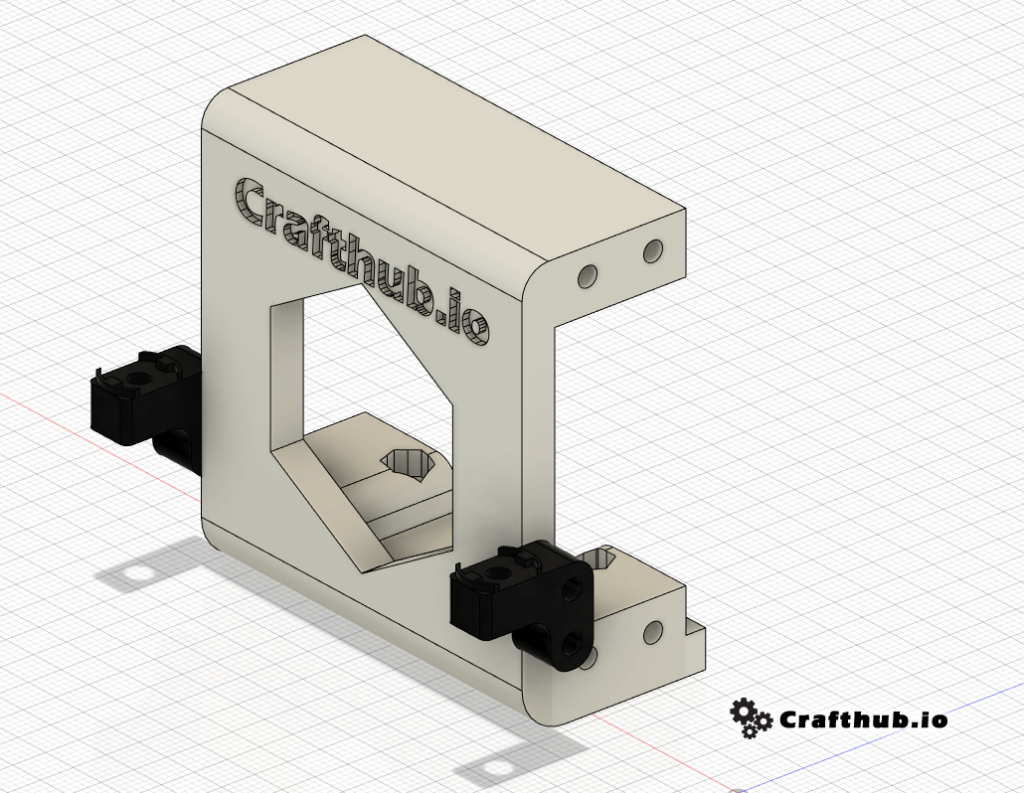
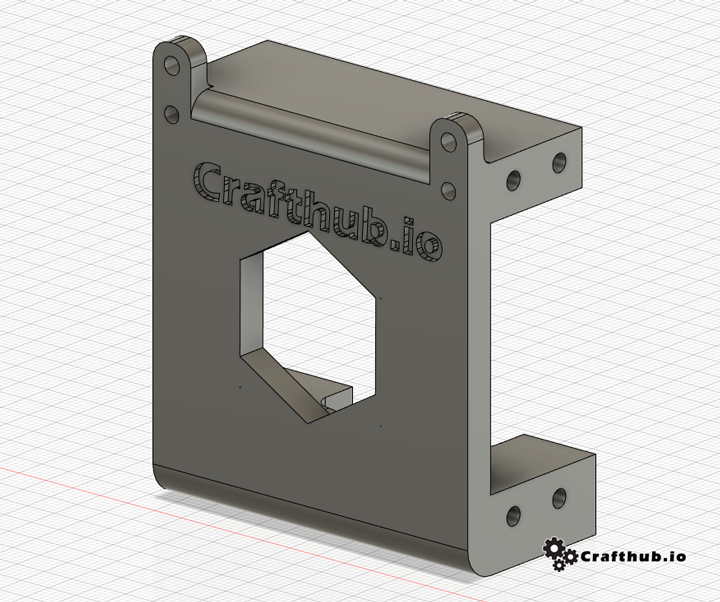
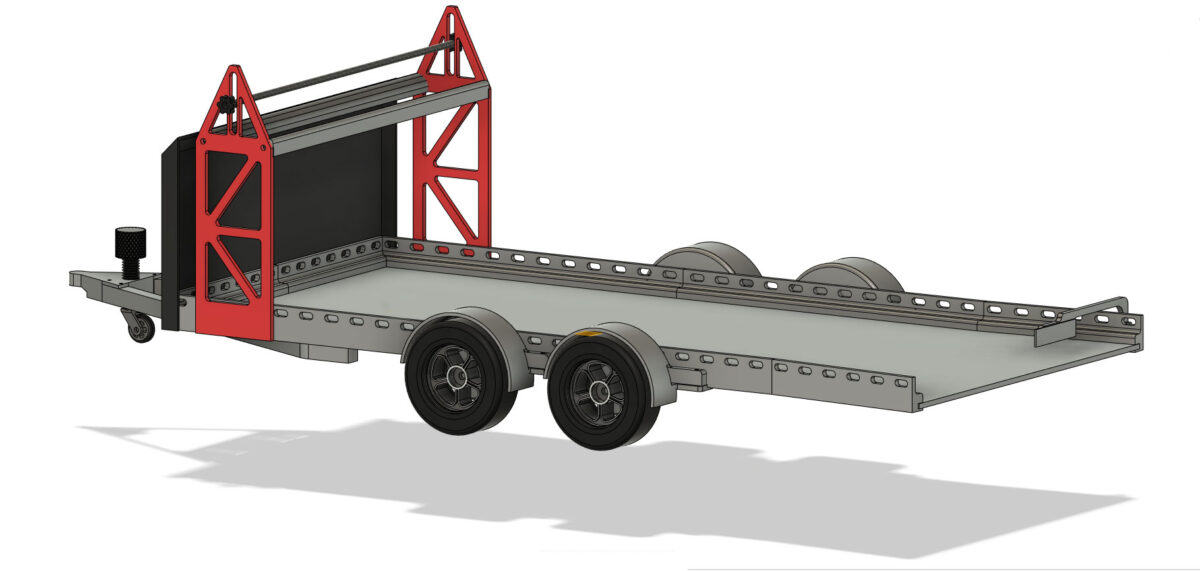
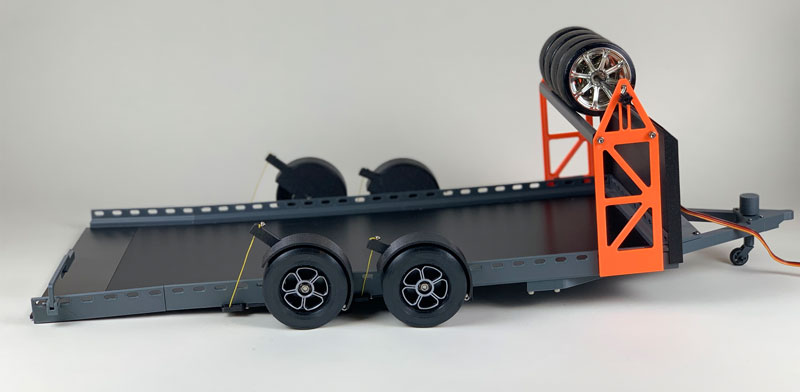
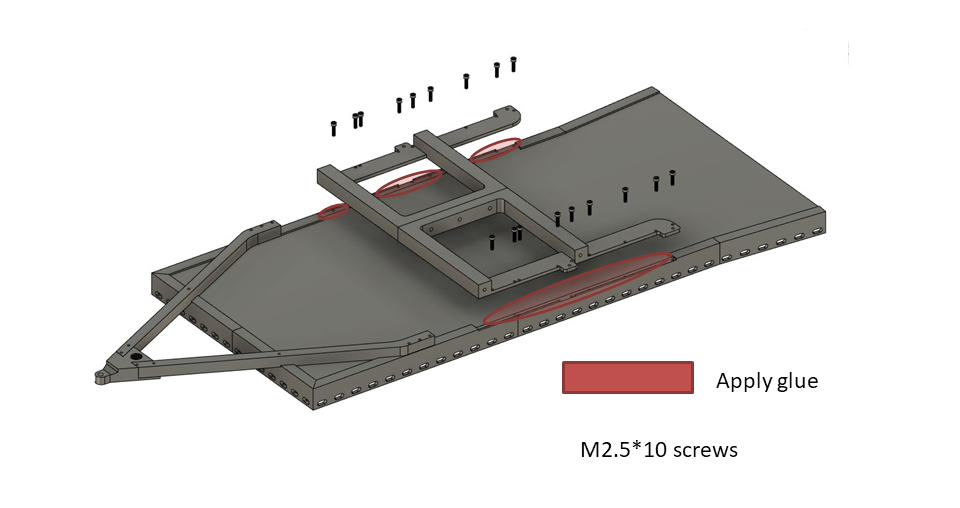
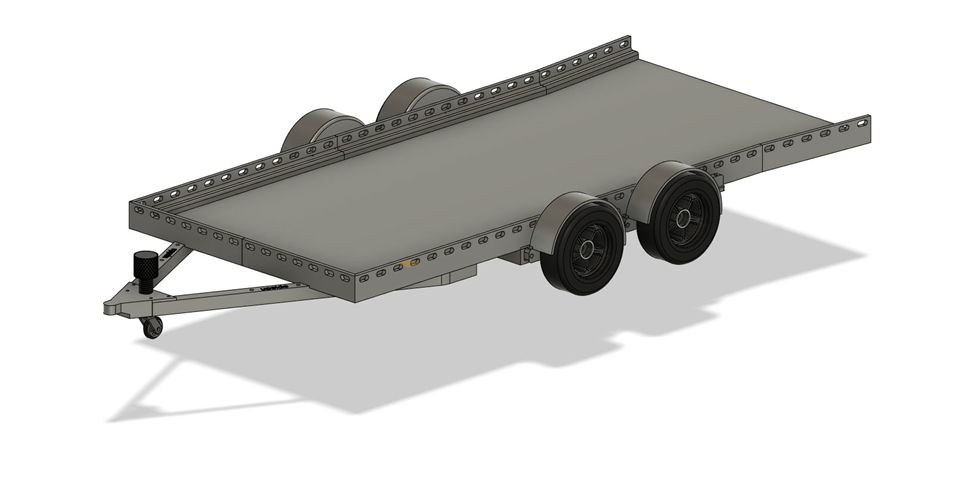
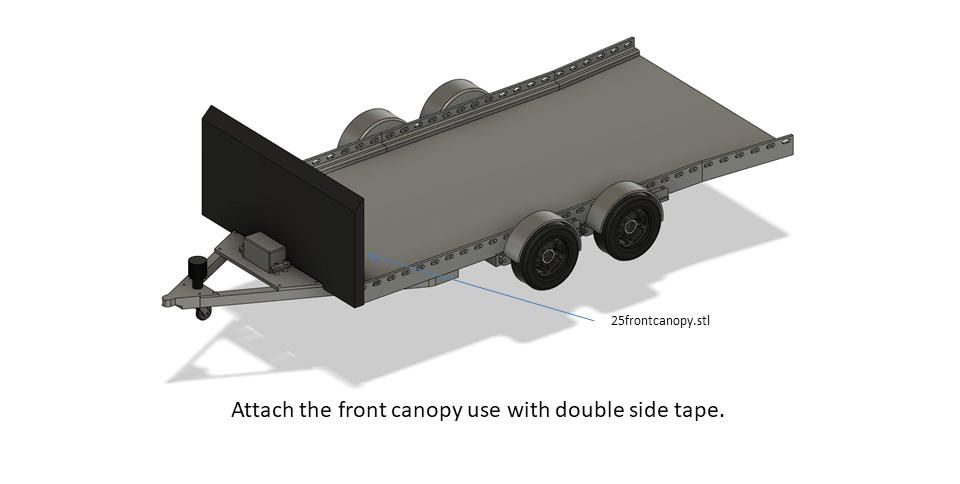
Mount the Tire rack use with double side tape. Take attention to the Tire rack direction.
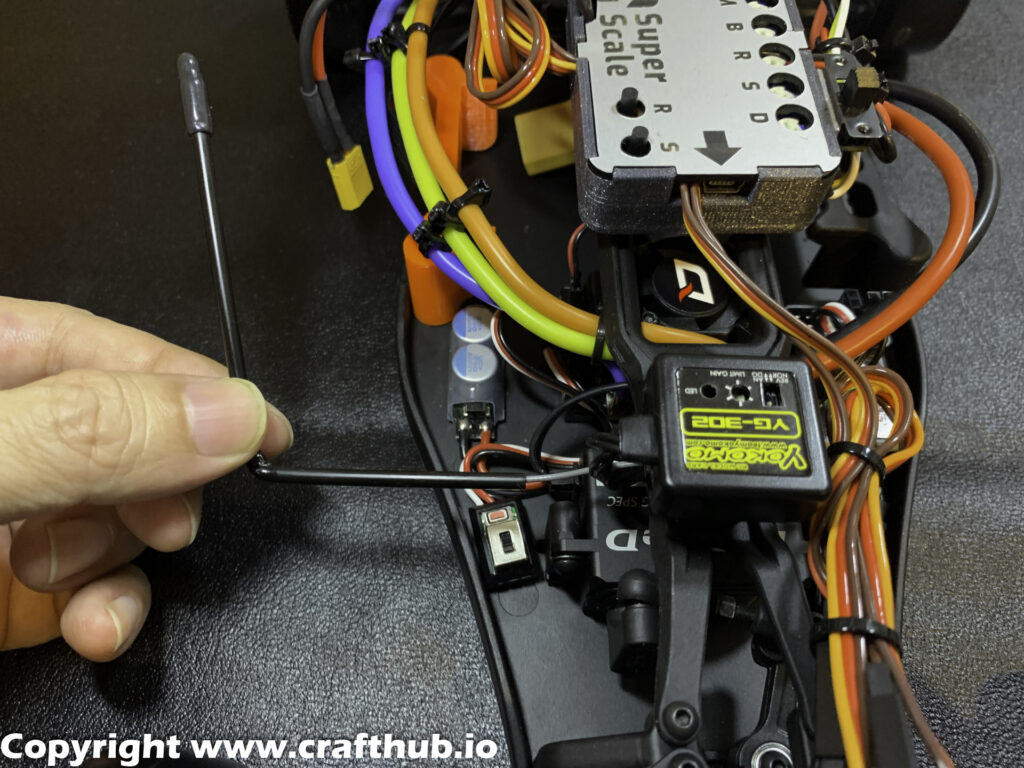
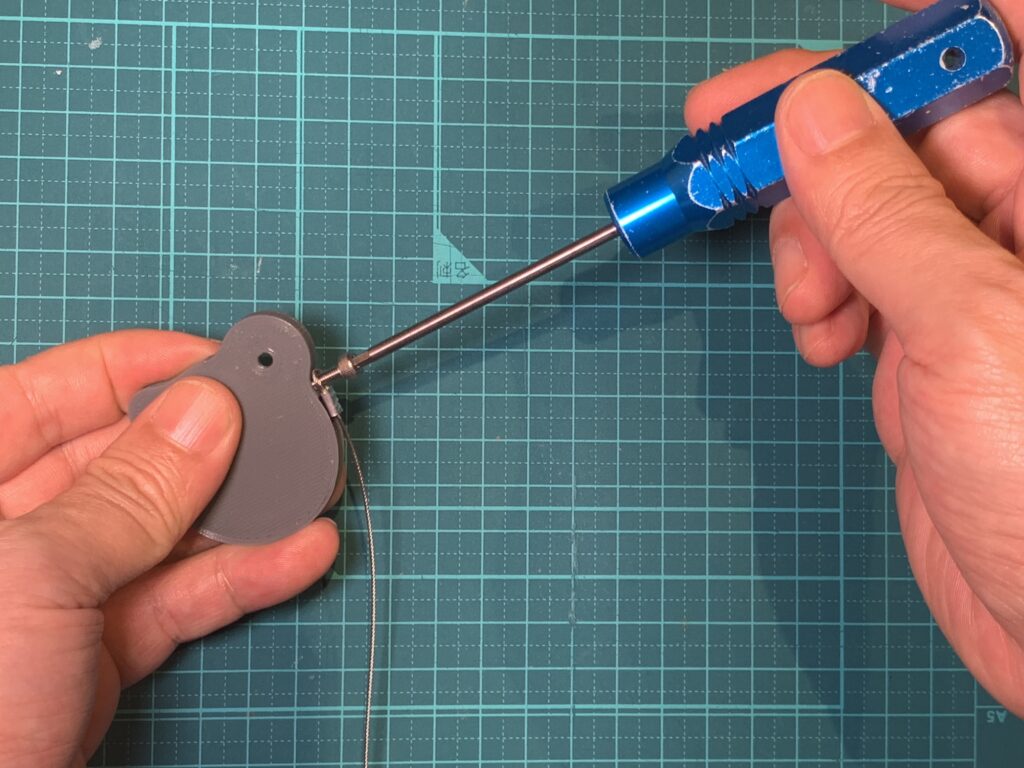
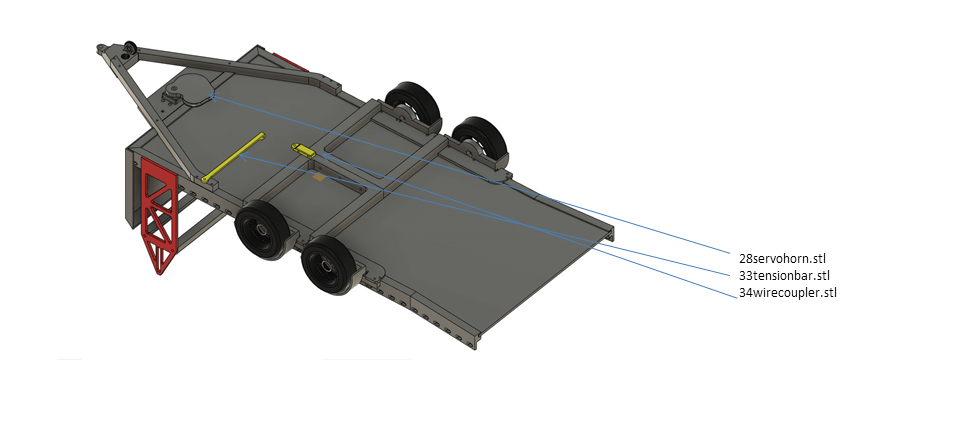
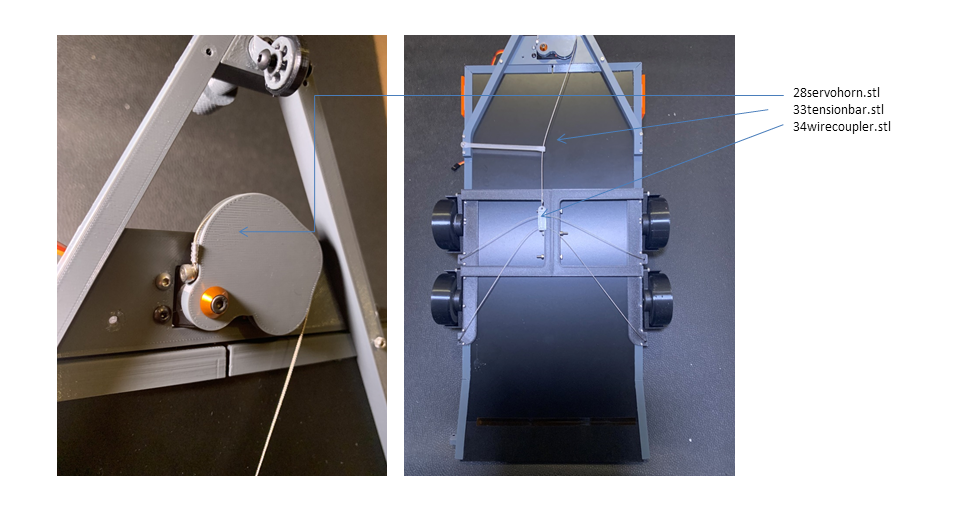
Retract mechanism
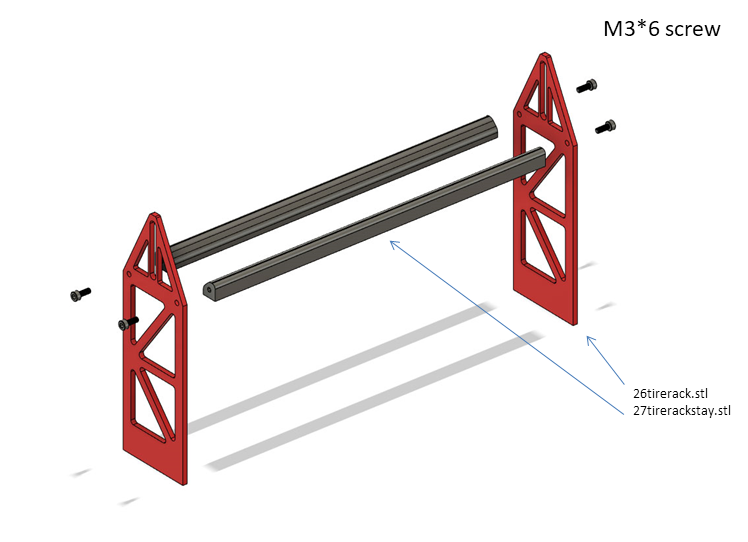
M3*8 screw Hangingwire0.8mm 28servohorn.stl
Running the wire like that and adjusting the tension.
Adjust the wire length and fix it.
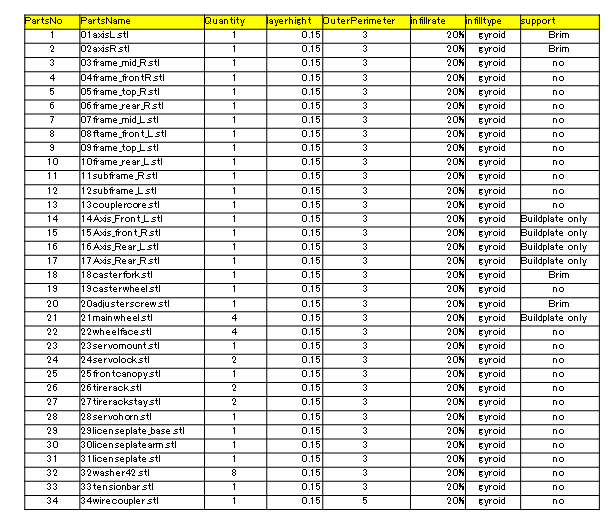
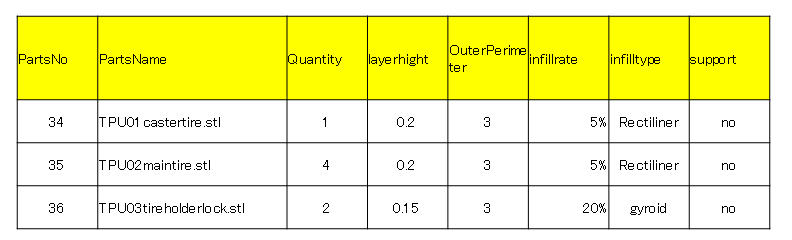
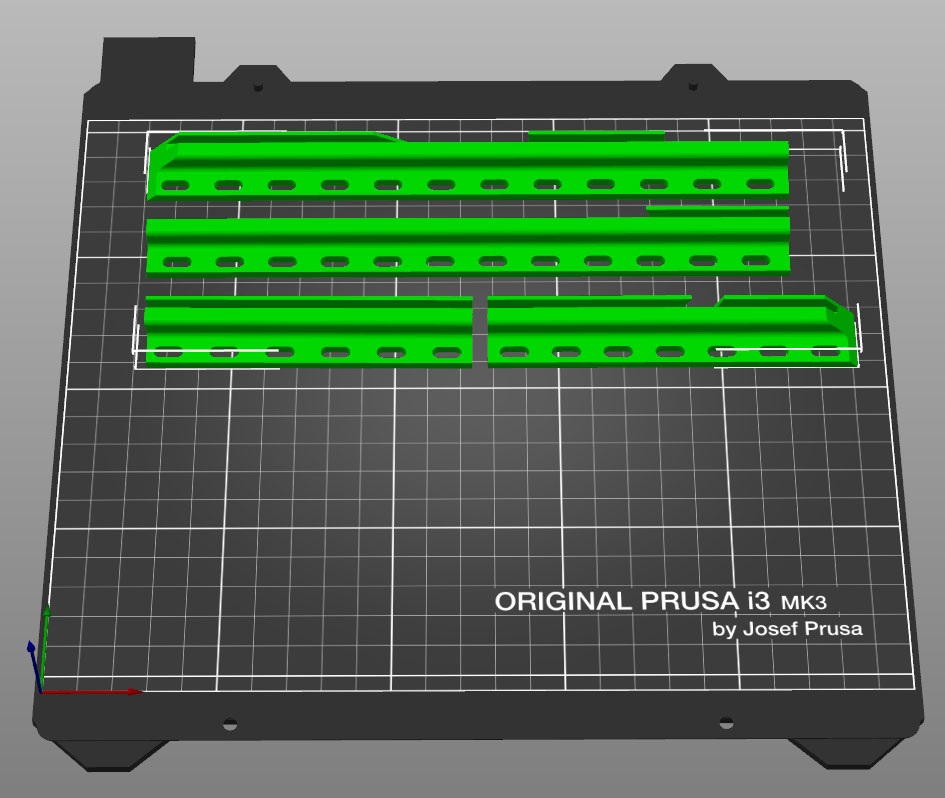
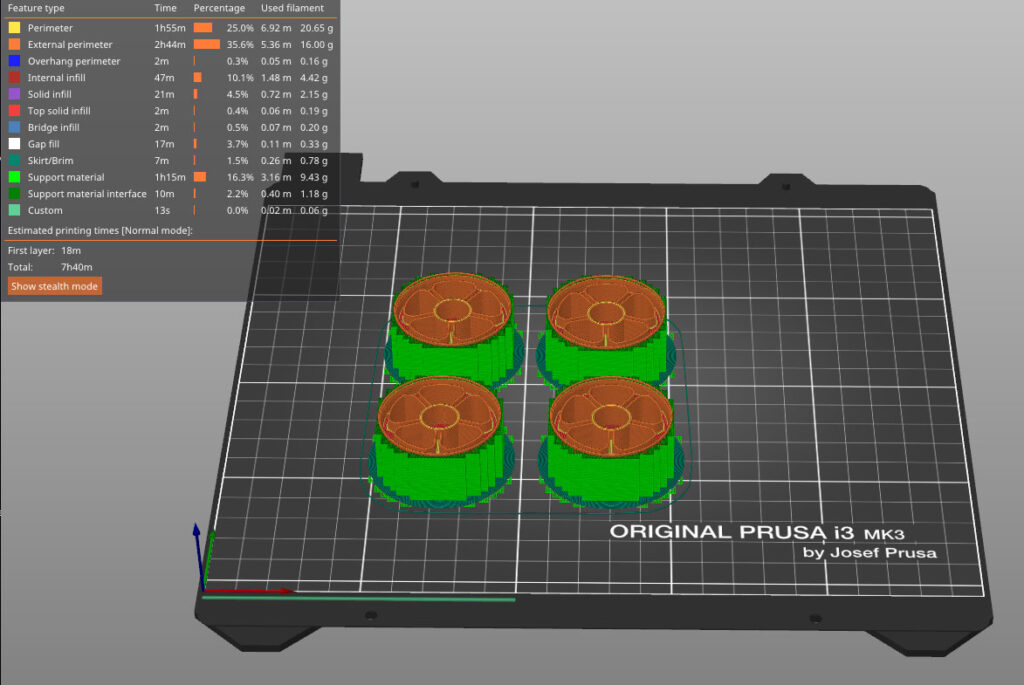
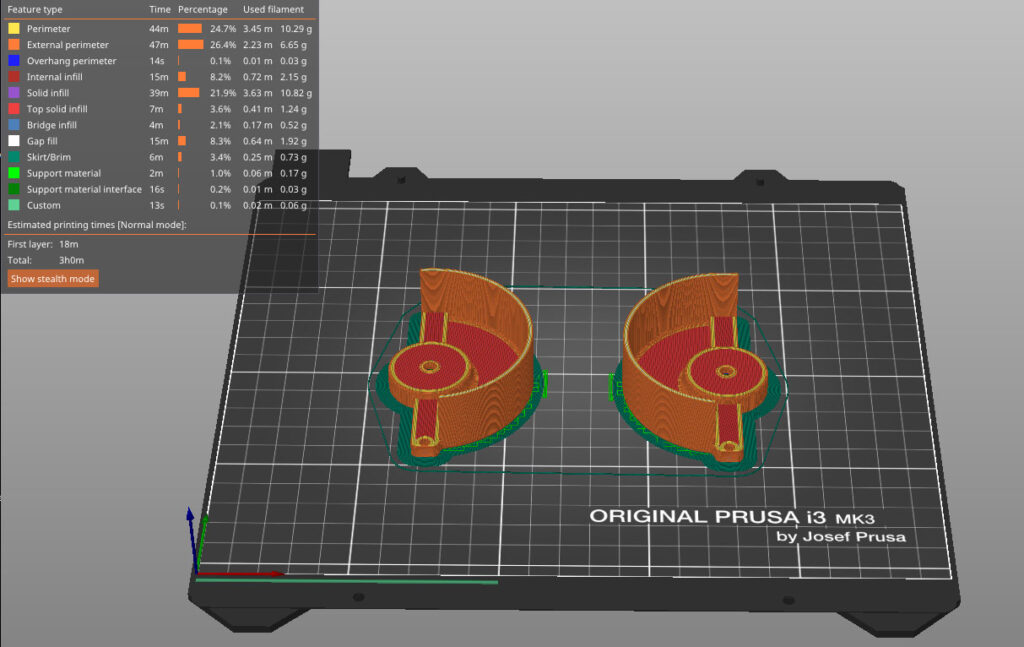
Slice Sample
Disclaimer
Do not use this file for commercial purposes without any permission. This model is designed to make FDM 3Dprinter, the parts have some additive markings, however, is no problem with those parts’ functions.
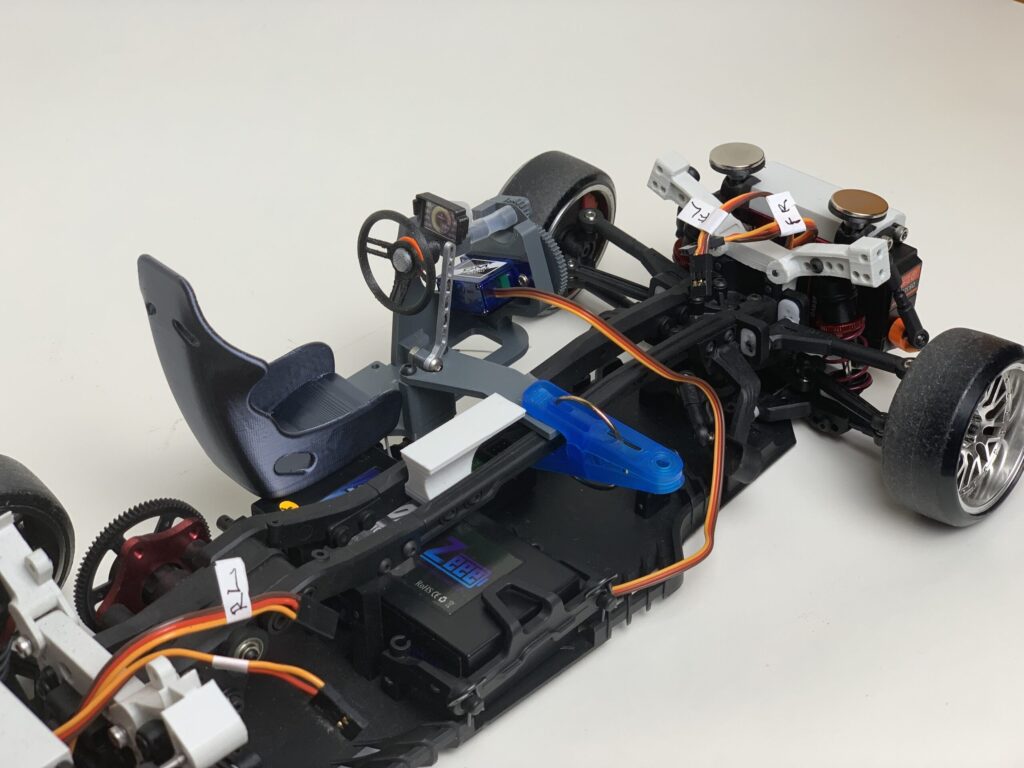
This kit is a detail-up kit for RCdriftCar. You can choose RHD/LHD. Connect the servo to the receiver’s unused channel, and mix the steering channel with your chosen channel.LED power is also taken from the receiver.
Note This data is optimized for 1/10Scale drift Car.
Datakit
You have to print out all parts by yourself. The material you should use depends on the parts. Please choose the correct and affordable material.
Future
Design for 1/10 scale drift car.
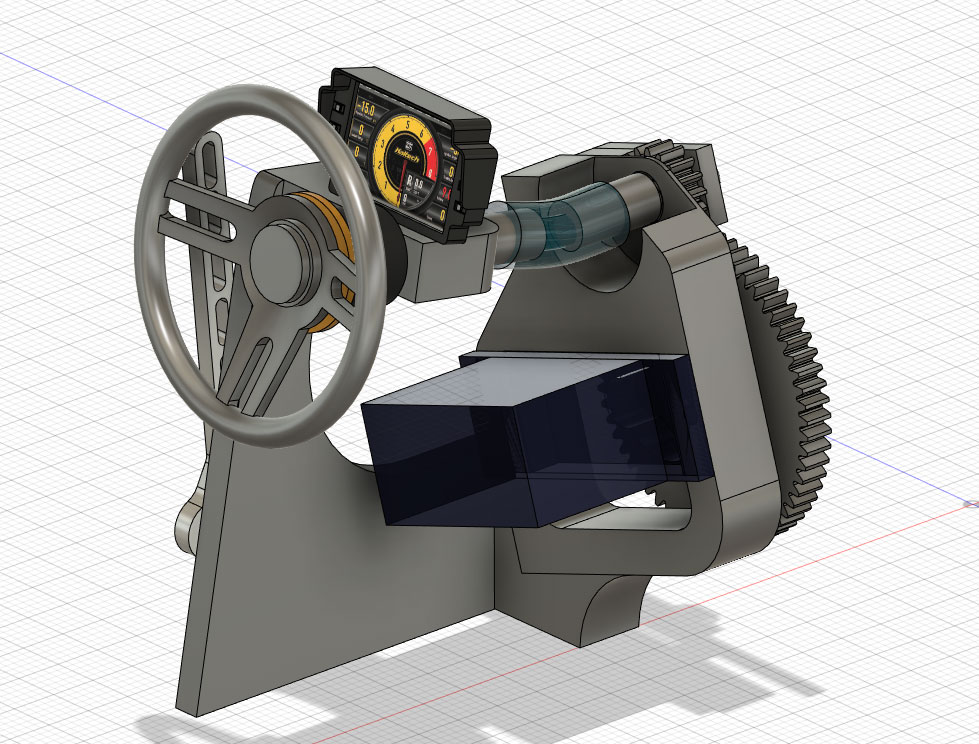
You don’t need any modification, even make a hole in the genuine chassis. Real Steering Wheel moves
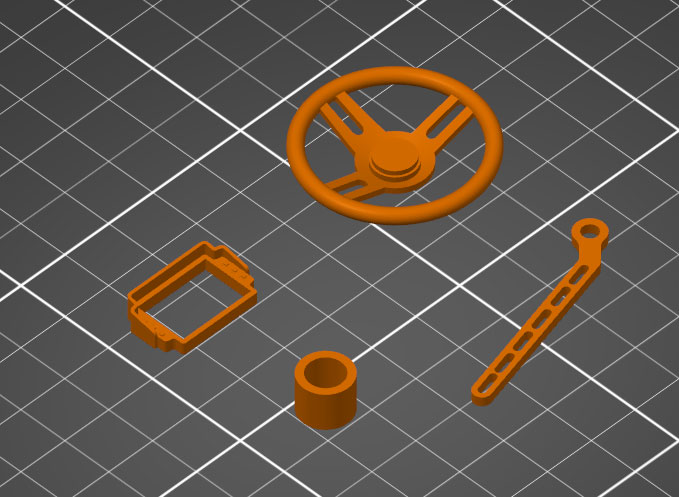
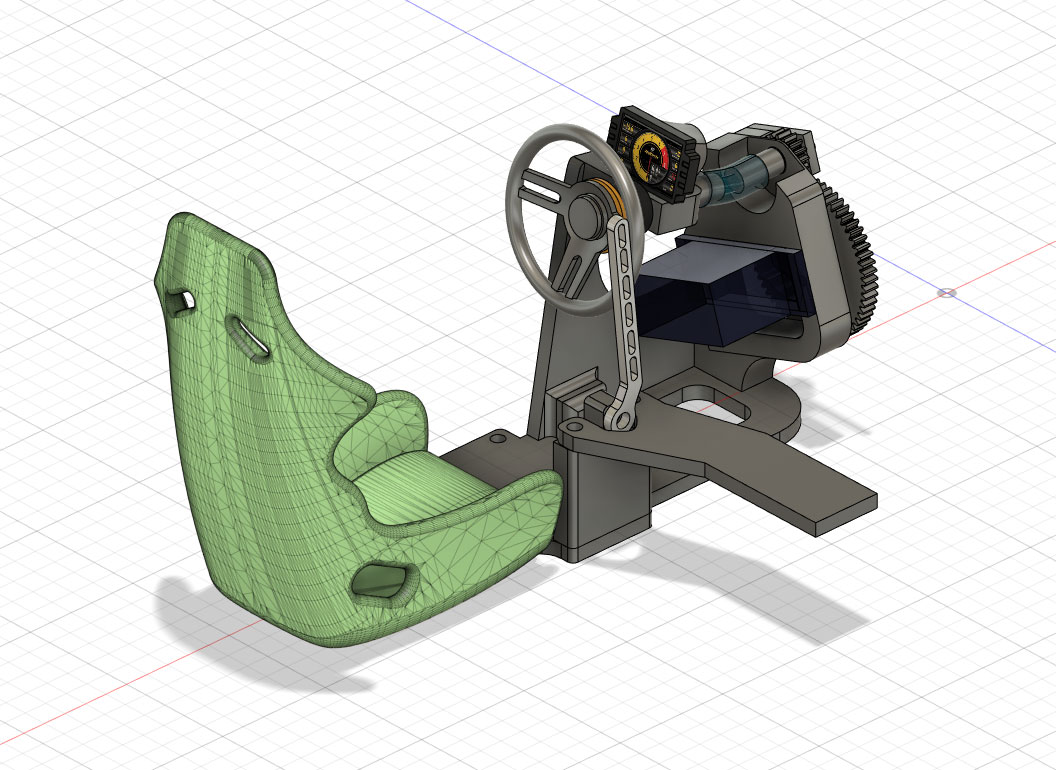
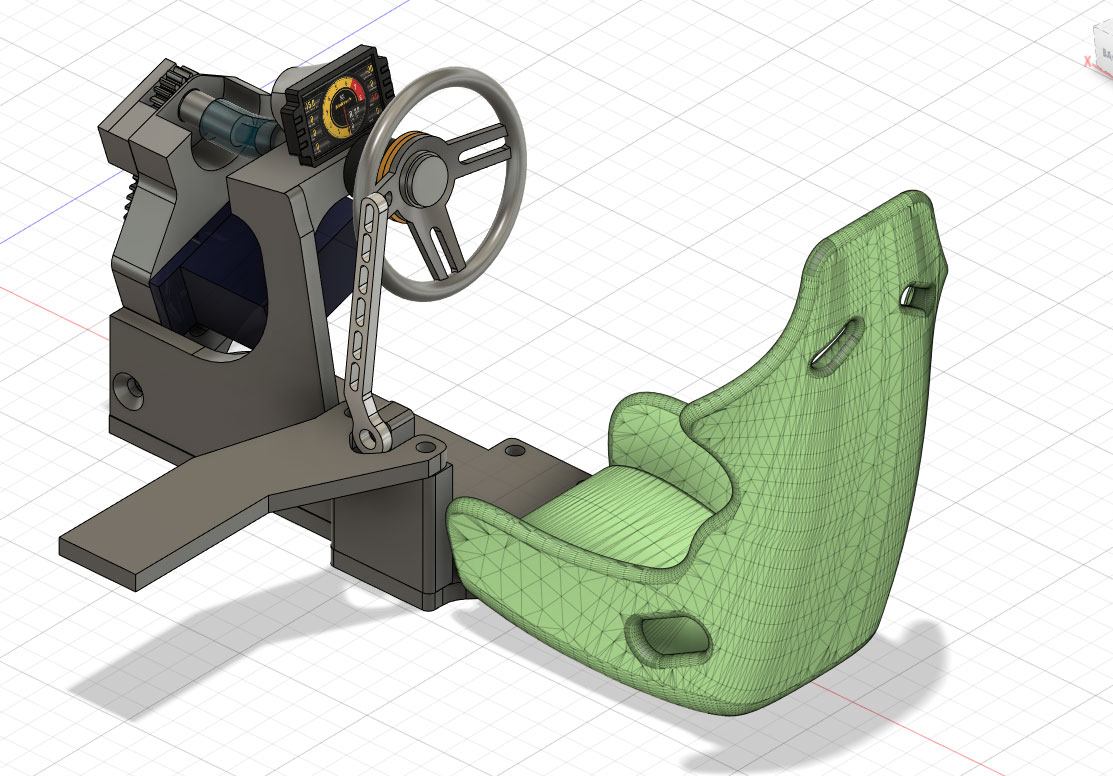
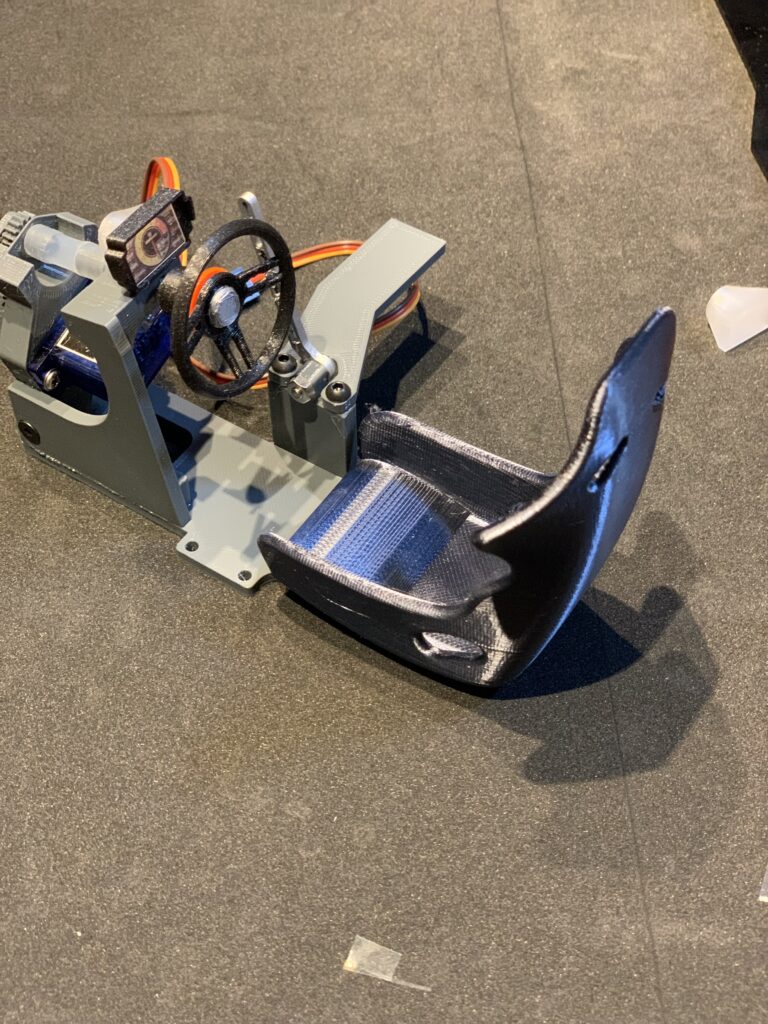
Detachable steering Wheel
1/10Scale engine monitors
Hand brake lever
What is contained in this kit?
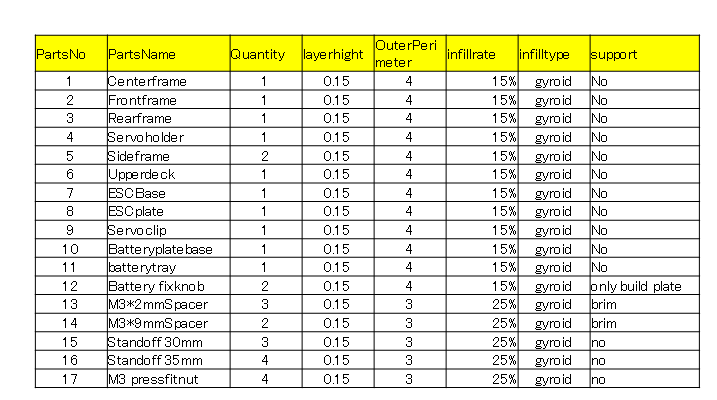
PETGpartsPLAorPETGPLAtransparentmaterialPETG
0.4mm nozzle All of parts infill rate: 20%or more.
Haltech displays JPG image, Print out with sticker sheet.
What you need without this kit
9gServo you can get from Amazon at a cheaper price
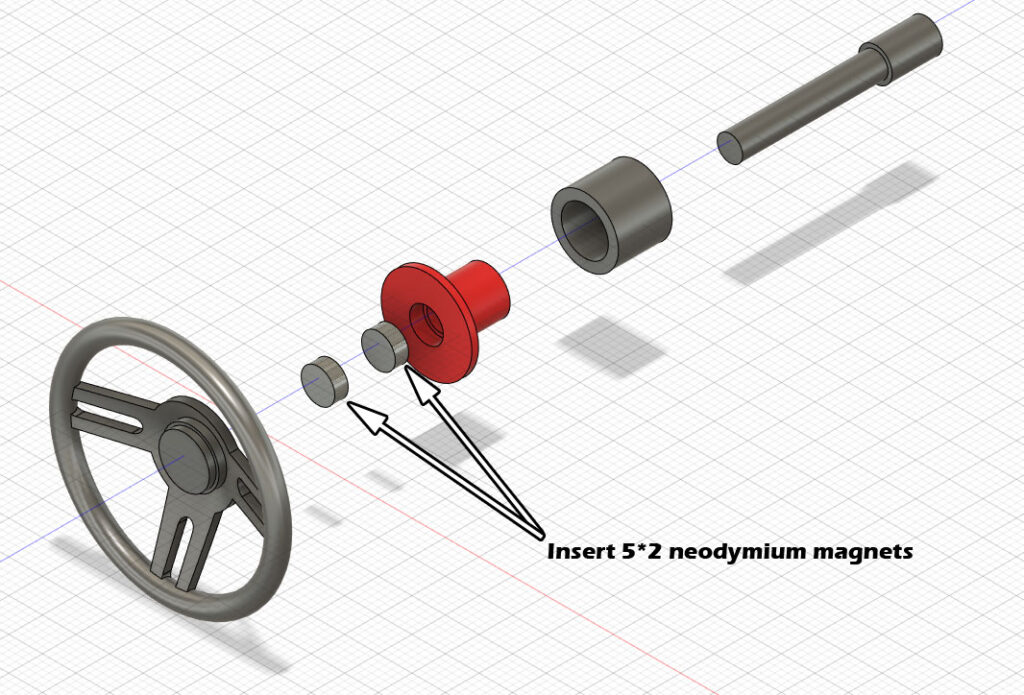
5*2 neodymium magnet you can get from Amazon at a cheaper price
Silicon tube Fuel tube for IC engine, you can get hobby shop.
3*6 Flathead screw x3
3*6 Botton screw x3
Appropriate Glue for the material.
Double side tape
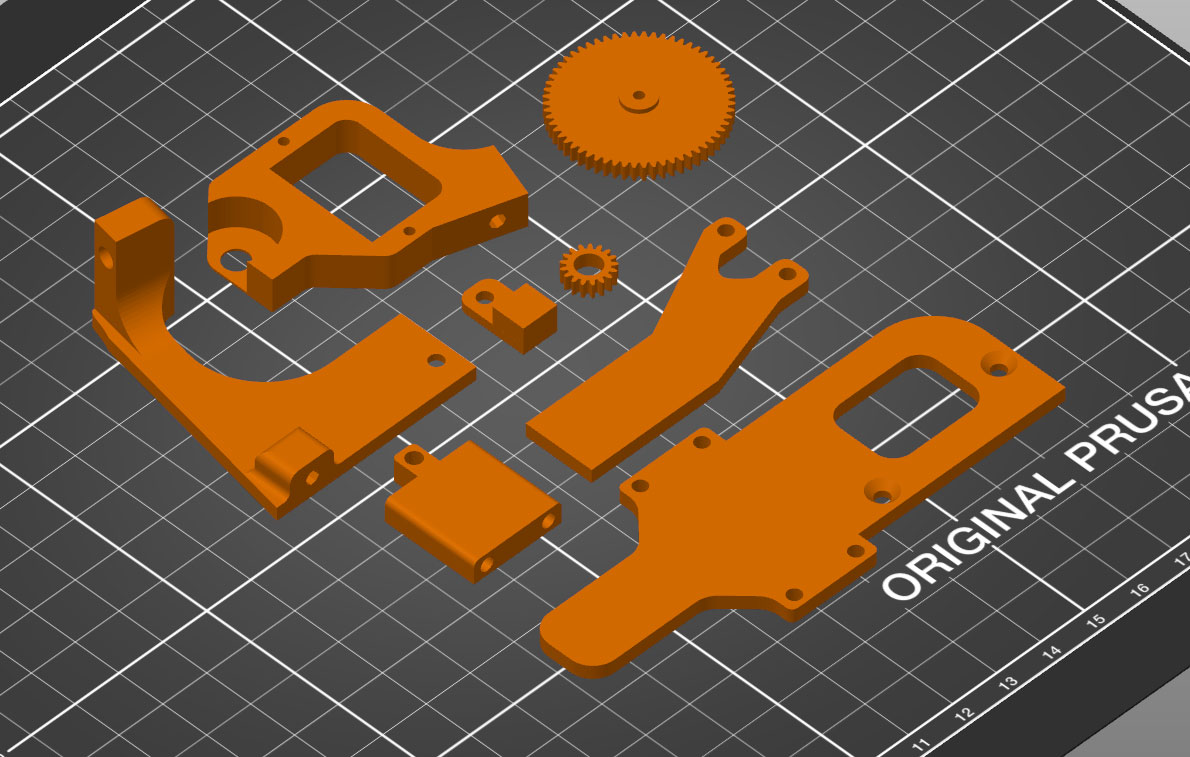
Assemble manual
1
Print out all parts with appropriate material. In this kit, we strongly recommend using Colorfabb HT filament.
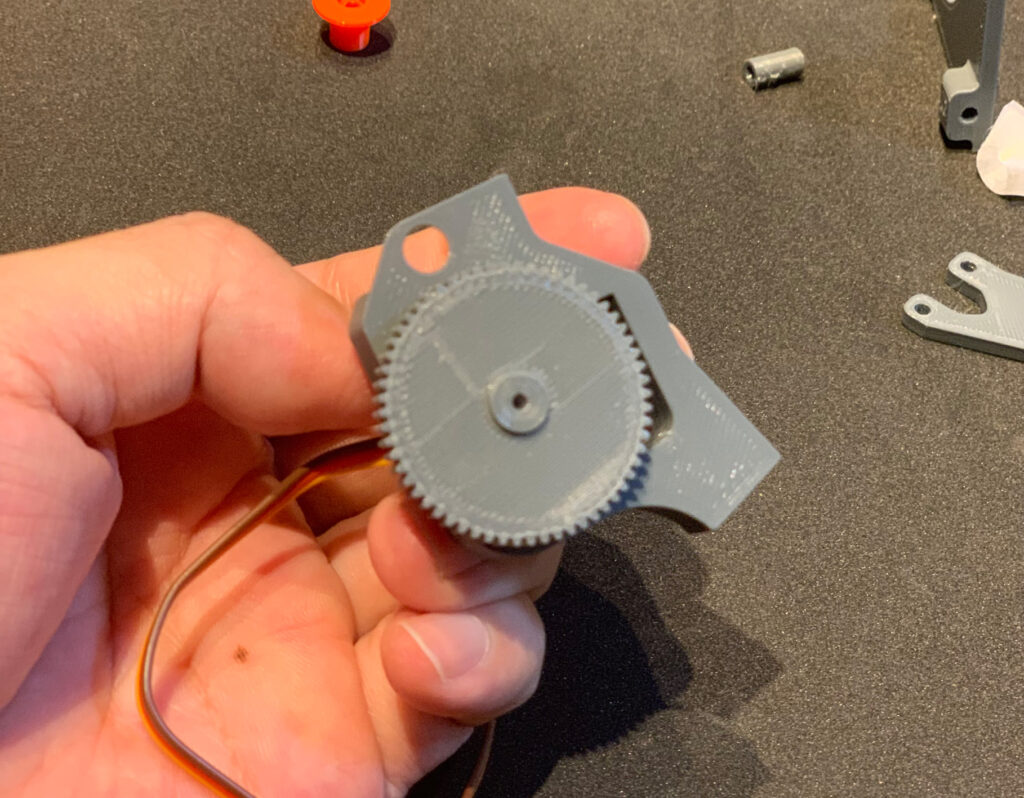
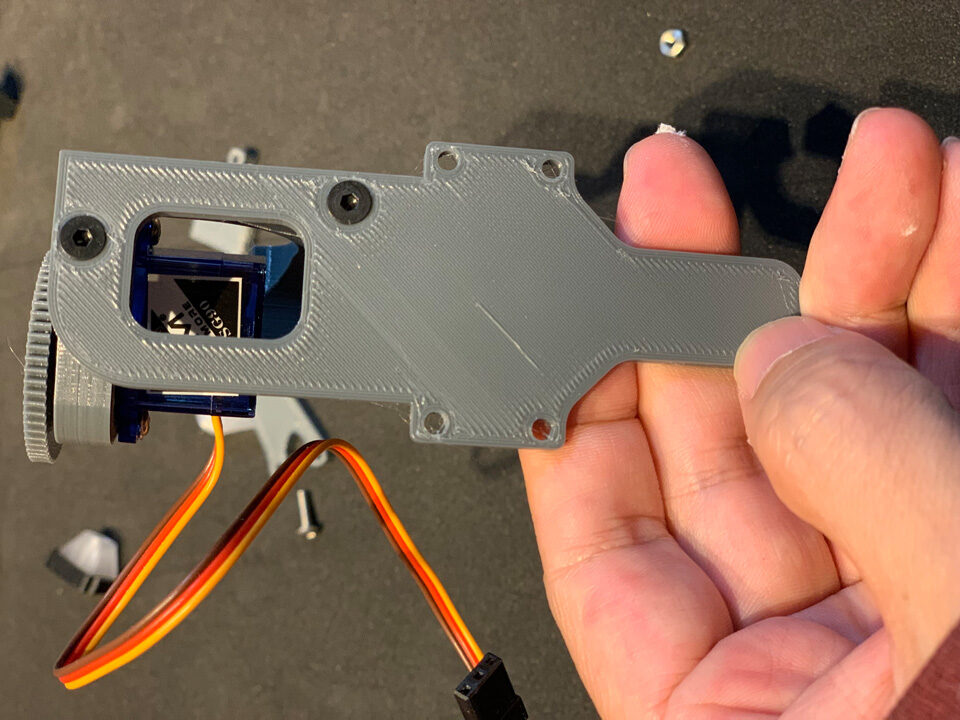
2,Gearholder
Install 9g servo on gear holder. Servo comes with self-tapping screws. Use this screw and assemble.
Check the part’s dimensions
3 install the gear
And set the gear with self-tapping screws that come with the servo.
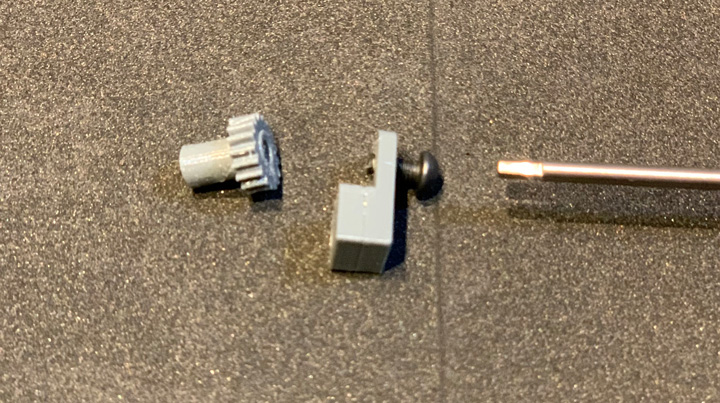
4 make output gear
Check output 17T gear and shaft. Gear should apply to the hole side. When assembling them, apply appropriate glue.
With the M3*6Bottun screw, the shaft must spin easily.
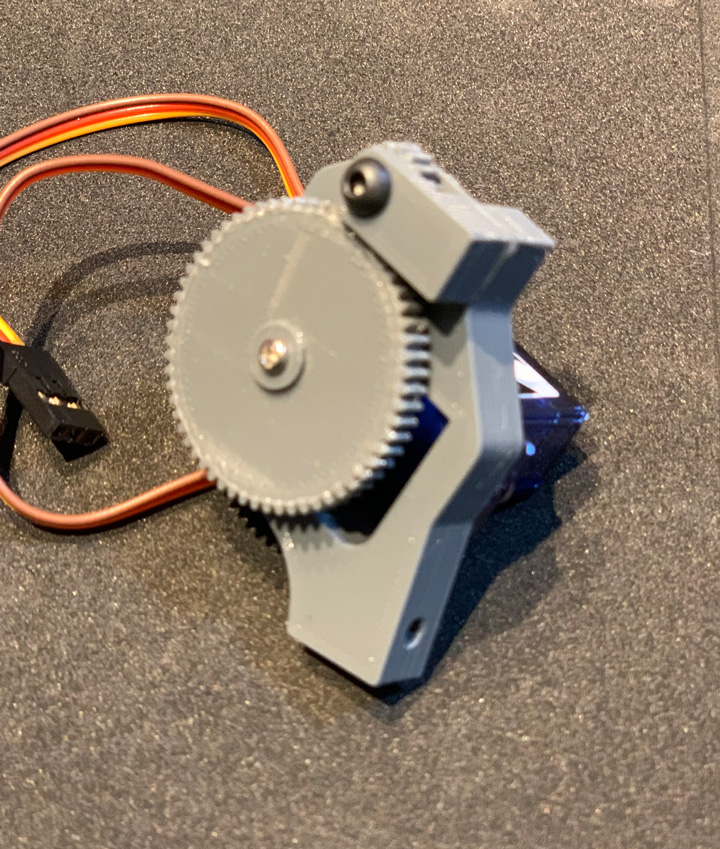
Those parts and the Gear frame assemble with glue. When you assemble it, please gear’s backlash and check the gears move smoothly.
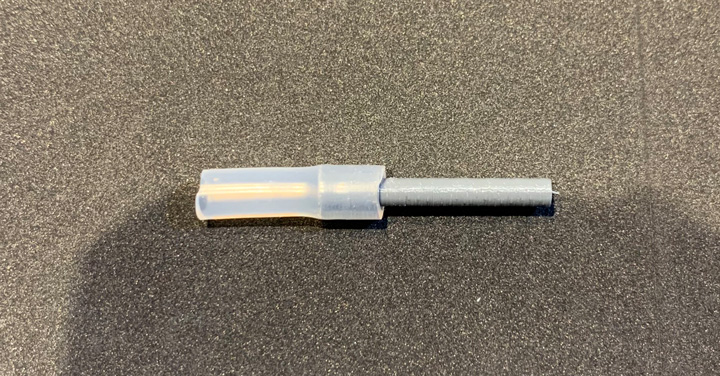
5, Assenble Steering shaft
Cut the silicon tube 22mm and connect the steering shaft.And then insert the shaft. If the hole is tight, smooth the hole using a 4 mm drill
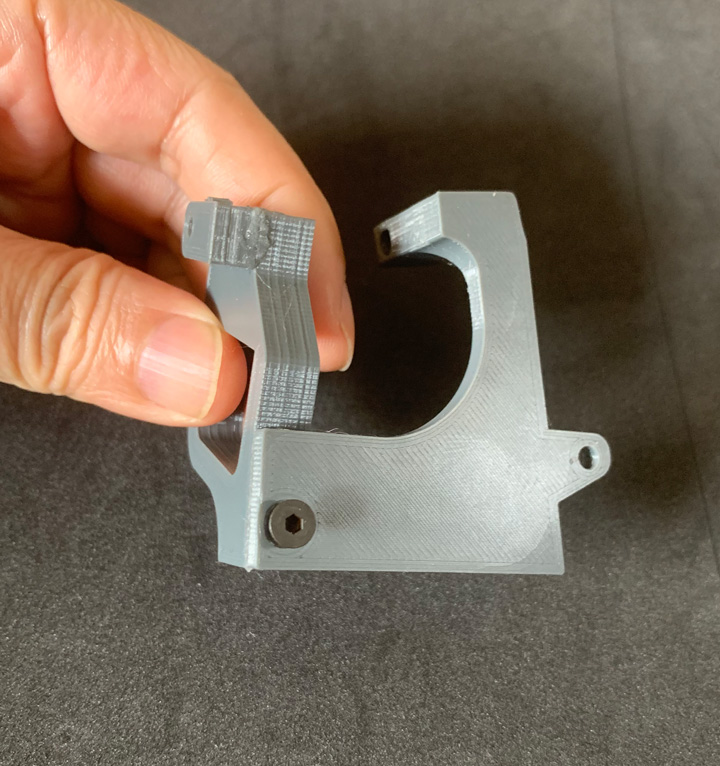
6 Assemble Steering Unit
Using glue with a screw will be better.
7 Steering column assembly
8 ChoseRHD/LHD
8-1 Engine monitor
This case chosen LHD
9, Attach to the chassis.
Use pinch,adjust the mounting place and fix with double-side tape
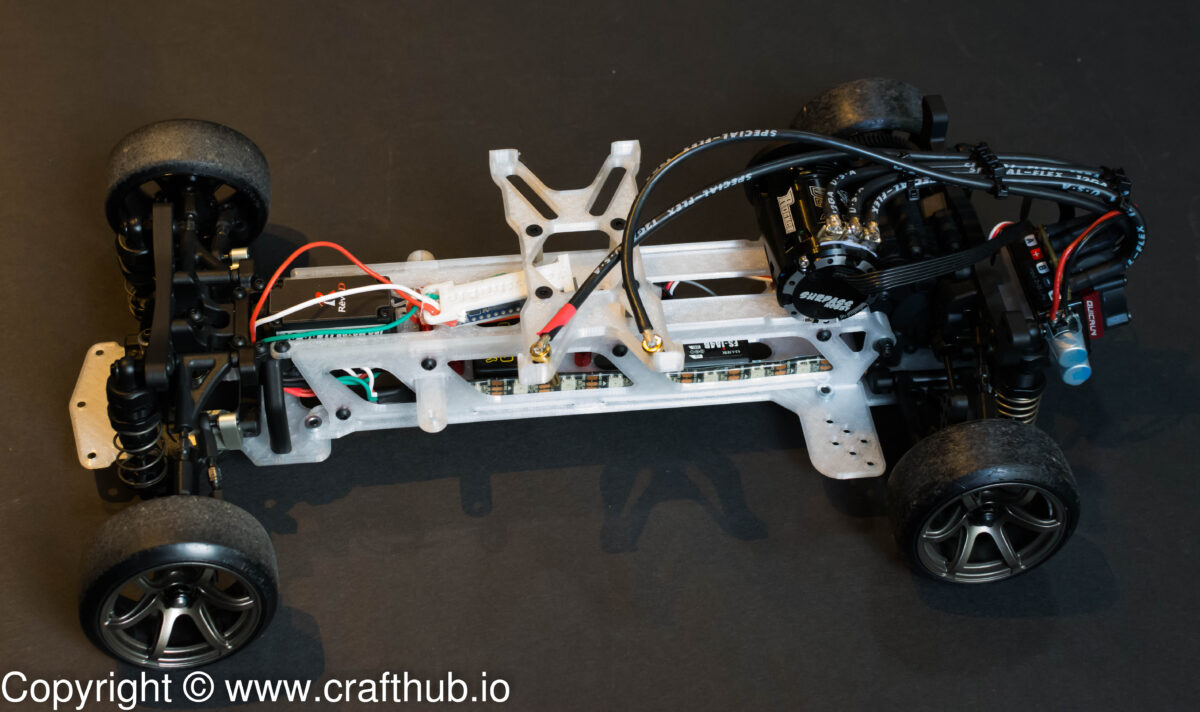
Sample MST RMX2.0
Disclaimer
Do not use this file for commercial purposes without any permission.
This model is designed to make FDM 3Dprinter, the parts have some additive markings, however, is no problem with those parts’ functions.
you use 3Dprinted frame parts only, you can also ride without any problem.
Caution: This manual`s image is shared with the carbon frame manual.
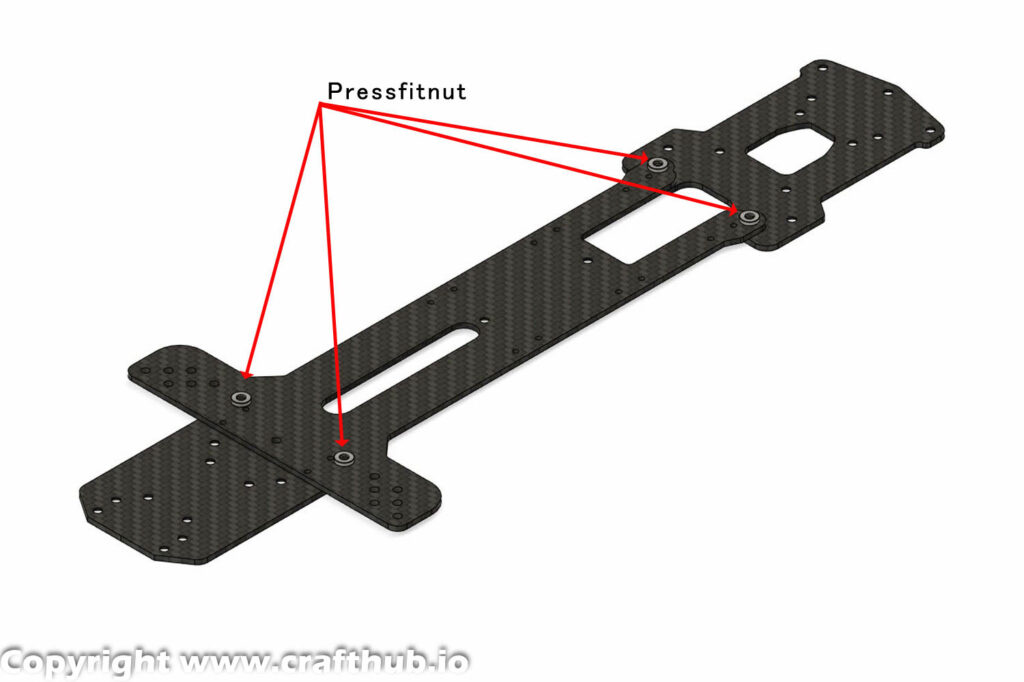
If you can get M3pressfit nut, please use it .otherwise you should use M3pressfitnut.stl
Caution: This manual`s image is shared with the carbon frame manual.
If you can get M3pressfit nut, please use it .otherwise you should use M3pressfitnut.stl
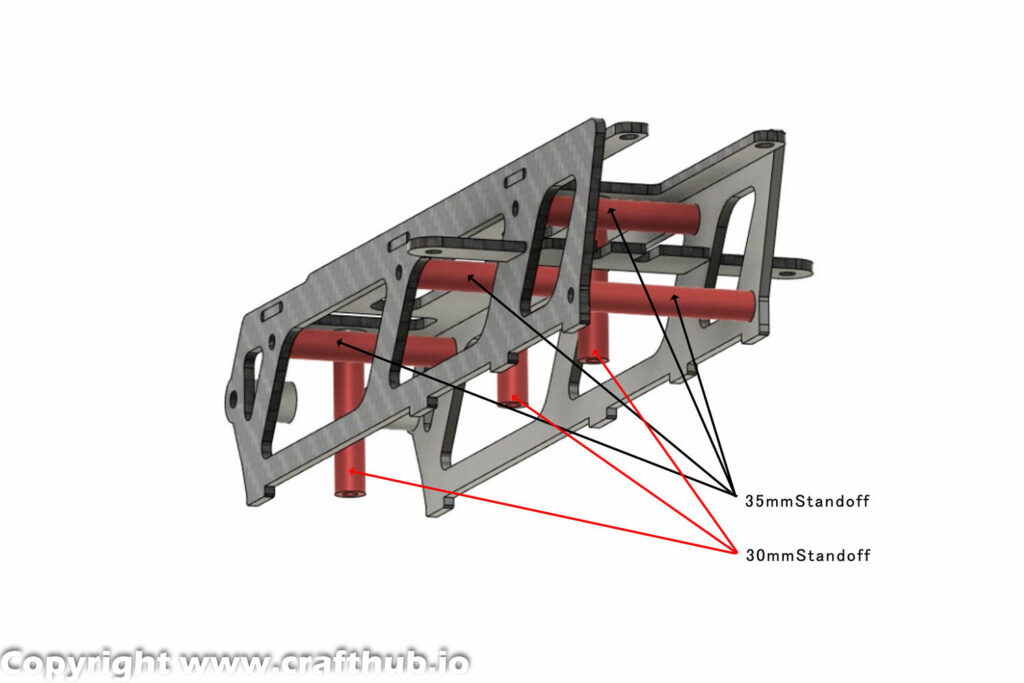
Caution: This manual`s image is shared with the carbon frame manual. Caution: This manual`s image is shared with the carbon frame manual.
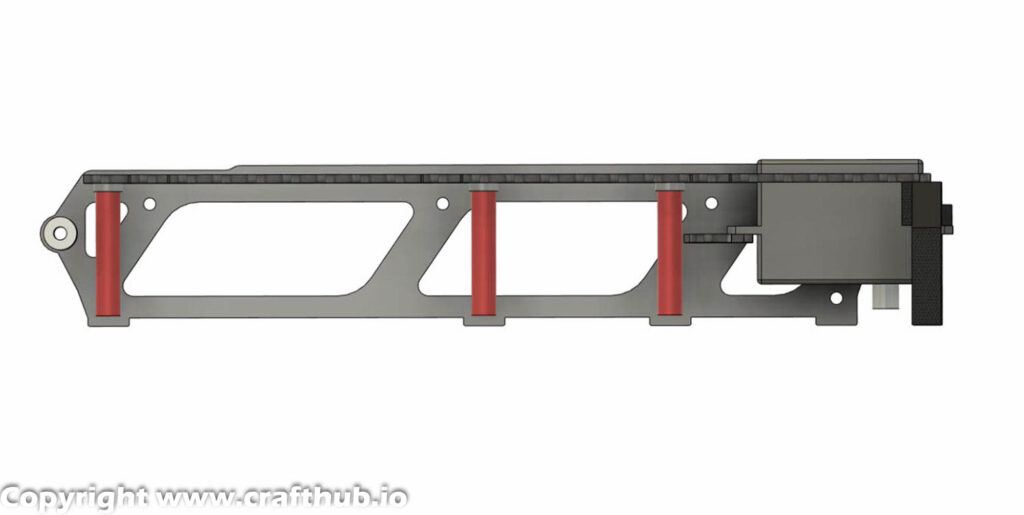
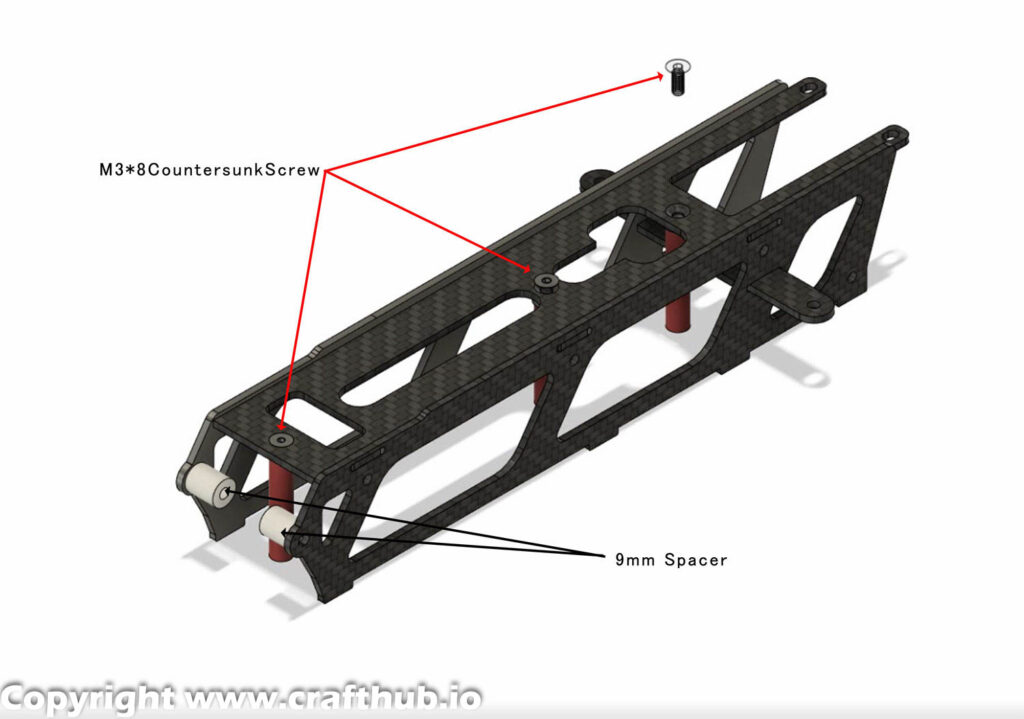
Place a 2 mm spacer between the upper deck and the 30 mm stand-off.
Caution: This manual`s image is shared with the carbon frame manual.
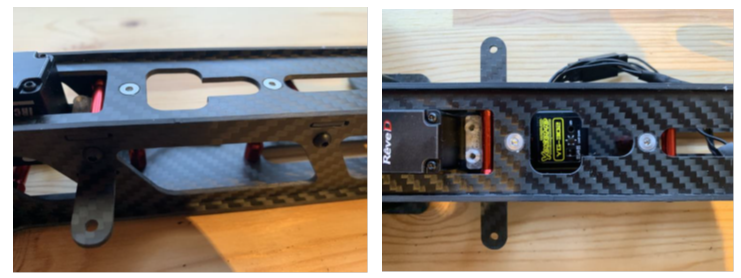
Please check the servo mount tab position.
Caution: This manual`s image is shared with the carbon frame manual.Caution: This manual`s image is shared with the carbon frame manual.Caution: This manual`s image is shared with the carbon frame manual.
-Install steering servo on the upper deck in the same orientation as the original chassis.
Install the receiver and gyro on the bottom deck with double-sided tape
( you can install the receiver and gyro on the top deck, but it will limit your placement
options of the battery tray).
Caution: This manual`s image is shared with the carbon frame manual.
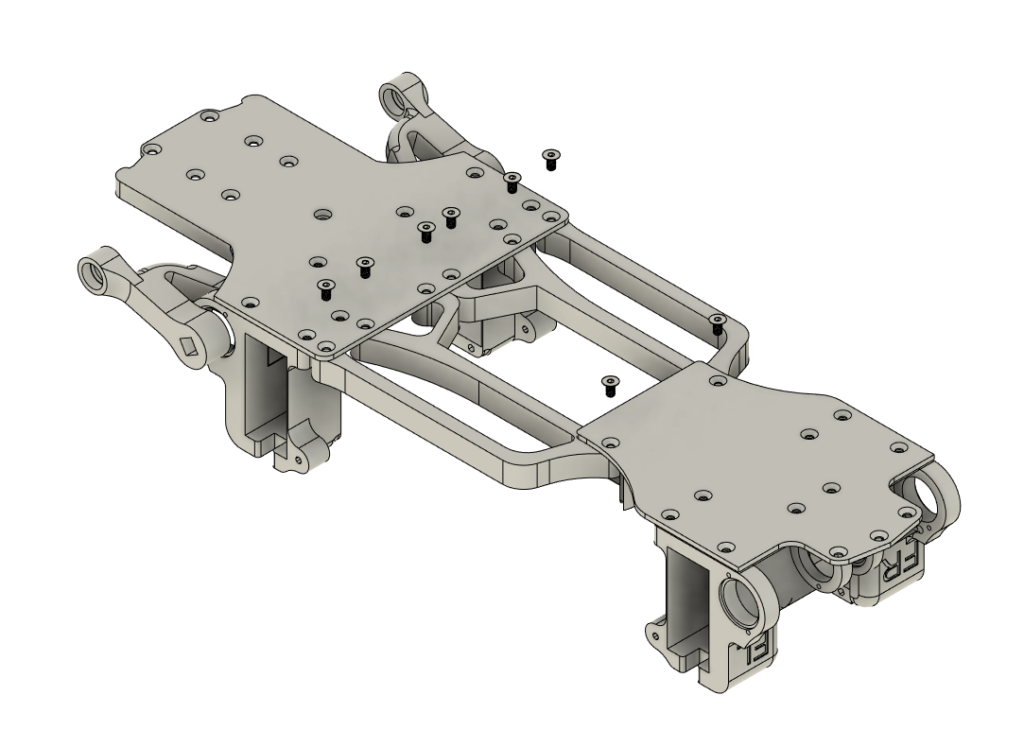
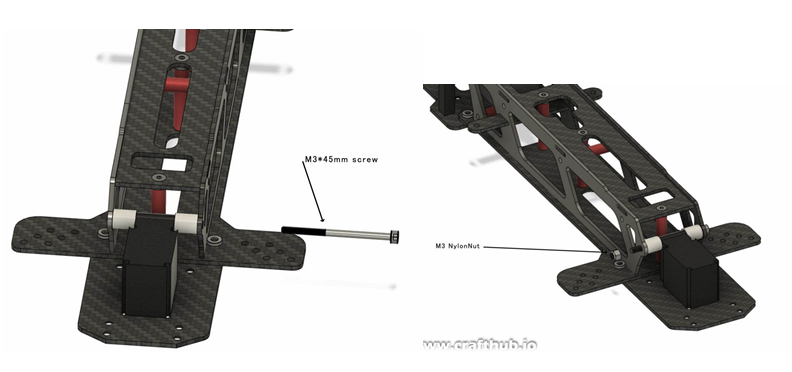
-Connect assembled upper deck and side frame to the bottom deck with 6x 3*8 flat head screws ( make sure your gyro and receiver are installed to the bottom deck before).
Caution: This manual`s image is shared with the carbon frame manual.
Use the service hole to adjust a Gyro
Caution: This manual`s image is shared with the carbon frame manual.
After connecting the upper and bottom deck slightly loosen all the screws and check that the body doesn’t have any distortion or misalignments, then tighten again.
Caution: This manual`s image is shared with the carbon frame manual.Caution: This manual`s image is shared with the carbon frame manual.
Adjust the battery mount place where you want.
Slice Sample
Disclaimer
Do not use this file for commercial purposes without any permission.
This model is designed to make FDM 3Dprinter, the parts have some additive markings, however, no problem with those parts function.